What “Physical AI” Means, From Labs to Home Desks
Physical AI is the growing field where artificial intelligence controls tangible machines and objects, from humanoid robots in research labs to small, expressive assistants that sit on a desk and respond to human voices. It merges perception, reasoning, and movement so that software can act in the physical world, not just in digital environments. Today, that spectrum stretches from the Nvidia Isaac GR00T robot, an open source robotics platform for advanced humanoid research, to Kira, a nostalgic Macintosh-like ESP32 AI assistant built for makers. Both projects point toward a future where interacting with AI involves bodies, faces, and gestures instead of flat screens. Together they show how open hardware and software are turning physical AI development into something that both professional robotics teams and hobbyists can experiment with directly.
Nvidia Isaac GR00T: A Reference Humanoid for Serious Robotics Research
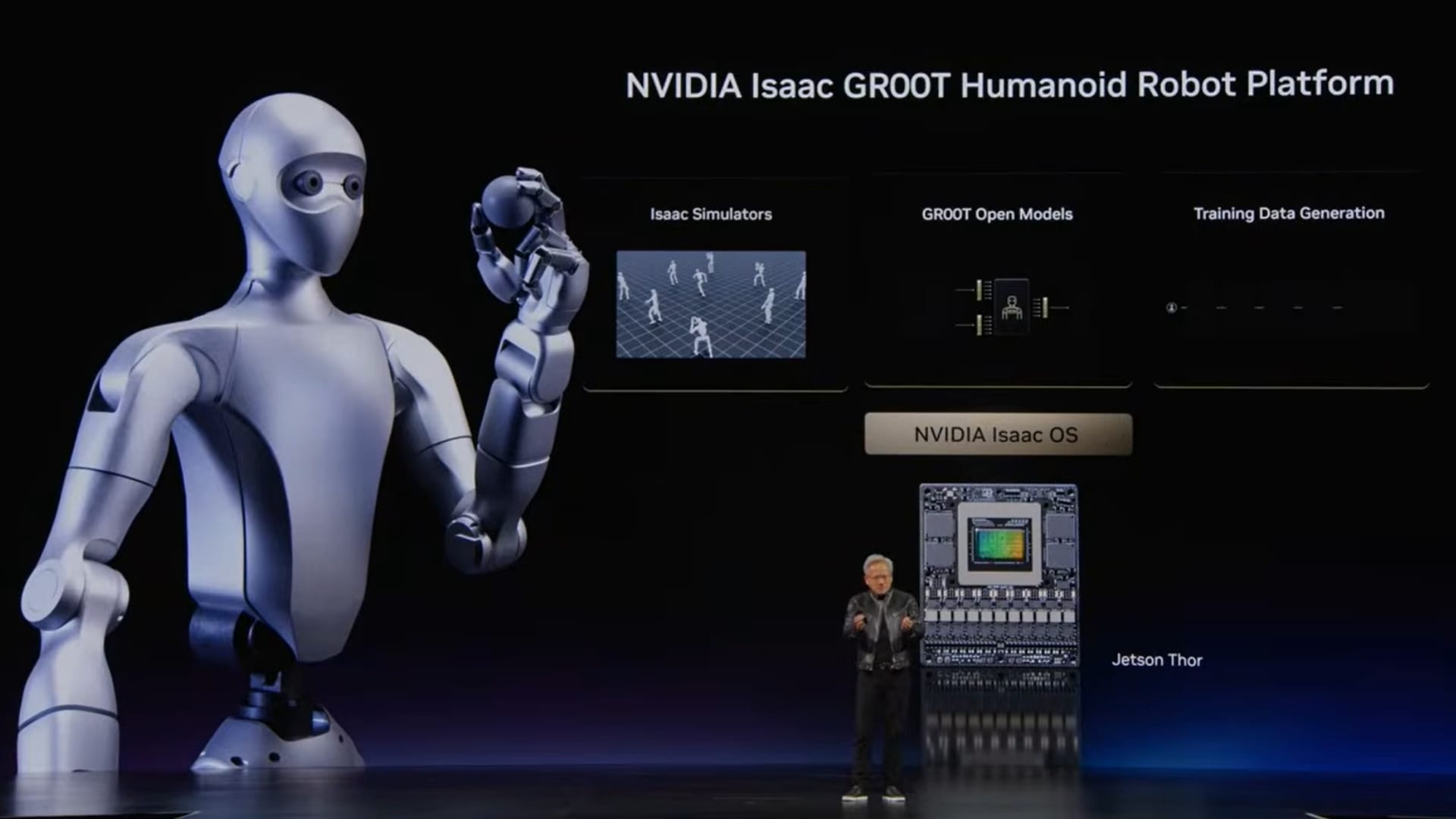
The Nvidia Isaac GR00T Reference Humanoid Robot is an open humanoid robot platform that aims to unify the messy workflow of modern robotics research. Built on a Unitree H2 Plus humanoid robot with 31 degrees of freedom, it pairs dual Sharpa Wave tactile hands, each with 22 degrees of freedom, with Jetson AGX Thor computing based on a Blackwell GPU. On top sits the Isaac GR00T software stack, which spans teleoperation (Isaac Teleop), simulation and training (Isaac Sim and Isaac Lab), deployment (Isaac ROS), and Nvidia’s open foundation models for humanoid behavior. Nvidia says the platform gives researchers “a single, open platform to make breakthrough discoveries toward general-purpose physical intelligence.” By also supporting the Unitree G1, it broadens access to a shared, open source robotics platform that can accelerate iteration and knowledge-sharing across labs.

Kira: A Maker-Grade ESP32 AI Assistant in a Mini Macintosh
On the other end of the spectrum, Kira reimagines physical AI as a playful, desk-sized companion. Designer Alisher Ashimov houses an open-source ESP32 AI assistant inside a miniature replica of the original 1984 Macintosh, complete with rounded corners, ventilation slots, and even a faux floppy drive in light khaki PLA. At its core is a Seeed Studio XIAO ESP32-S3 Sense microcontroller, which powers voice interaction, an expressive OLED "face," and local AI-assisted behavior in a compact footprint. Instead of proprietary enclosures or closed ecosystems, Kira is built from accessible components that makers can study or adapt, illustrating how DIY AI hardware projects are moving beyond software experiments into tangible objects. By turning an ESP32 AI assistant into a character-like desktop presence, the project shows how open-source hardware can make physical AI feel friendly, personal, and easy to tinker with.

Two Open Paths Into Physical AI Development
Comparing Nvidia Isaac GR00T and Kira reveals how open-source principles now cover both high-end and hobbyist physical AI development. Nvidia’s reference humanoid gives researchers a complete stack: standardized hardware, simulation tools, data-collection pipelines, ROS-based deployment, and open foundation models. That consistency lowers integration pain and helps labs share results and code on a common open source robotics platform. Kira, by contrast, targets makers who work with 3D printers, PLA, and microcontrollers. Its ESP32-based design proves that expressive, AI-enabled objects can run on low-cost, readily available boards rather than datacenter hardware. Together they form an ecosystem: research-grade humanoids advance algorithms, control strategies, and safety practices, while DIY AI hardware projects test how people want to live with and personalize these systems. Both routes invite more people to participate in building physical AI, whatever their skill level.