What Open-Source Robotics Means for the Next Wave of AI-Powered Robots
Open-source robotics is the collaborative development of reusable software, tools, and standards for robots under permissive licenses, allowing researchers, startups, and hobbyists to share code, simulation assets, and hardware integrations so they can build AI-powered robots faster and at lower cost than with proprietary, closed systems. This shift turns robotics from a collection of isolated projects into a shared infrastructure, where common problems such as perception, navigation, and control are solved once and reused many times. By removing licensing fees and vendor lock-in, open platforms reduce barriers for students and small teams. More importantly, they create a common language for the robotics development community, so ideas, bug fixes, and new algorithms spread quickly across labs, companies, and continents, enabling a more democratic and collaborative robotics innovation model.
ROS and Open Robotics: Building a Common Operating System for Robots
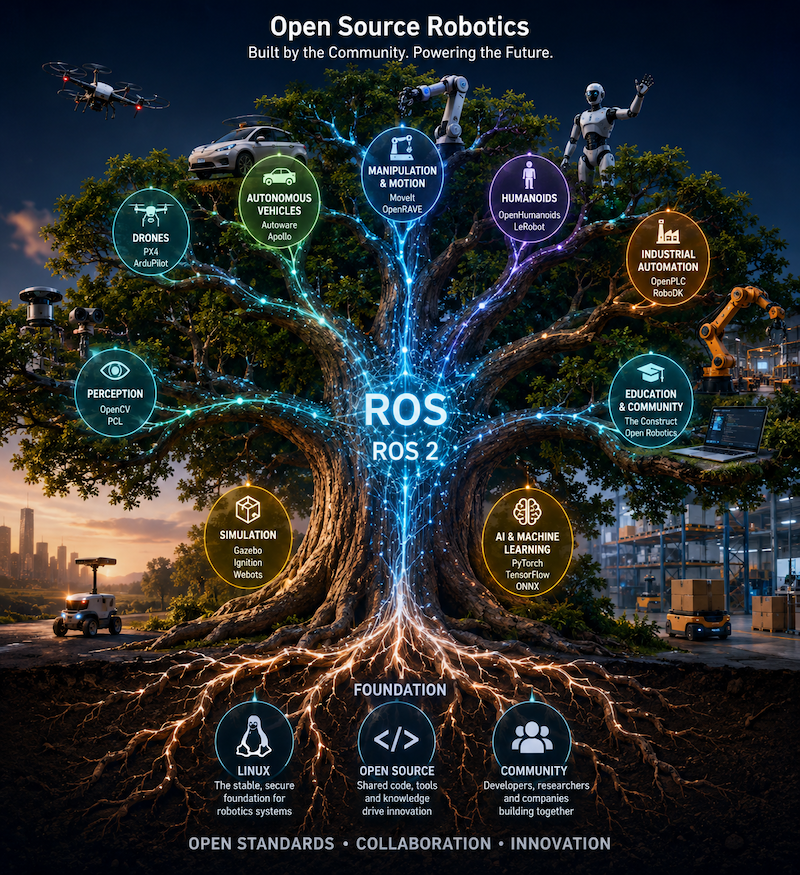
The Robot Operating System, or ROS, is the cornerstone of modern open-source robotics. Developed from work at Stanford’s AI Lab and expanded at Willow Garage, ROS introduced a modular, message-based architecture where core capabilities like localization, motion planning, and manipulation are packaged as reusable components. According to Robotics and Automation News, ROS “did for robotics what Linux did for computing,” giving developers a shared software stack instead of scattered proprietary frameworks. Open Robotics, the organization behind ROS and the Gazebo simulator, now steers this ecosystem and is outlining an “open foundation for the age of AI-powered robots” at the Robotics Summit & Expo. Through the Open Source Robotics Alliance, Brian Gerkey and collaborators are pushing new standards that blend AI tools, safety practices, and security measures, allowing AI-powered robots to move from research labs into reliable industrial and service deployments.

Global Frameworks: OpenHarmony and the Rise of Multi-Robot Operating Systems
Open-source foundations are not limited to ROS. A new robot operating system based on OpenHarmony shows how open frameworks can support distributed, AI-native robotics. M-Robots OS 2.0, introduced by Shenzhen Kaihong Digital Industry Development, is described as a multi-robot operating system that coordinates diverse robots, devices, and AI agents under one architecture. It offers a modular “building block” design that scales from tiny embedded boards to large industrial robots and supports hybrid real-time deployment on single-chip multi-kernel setups. The platform’s M-DDS framework builds on OpenHarmony’s distributed soft bus, enabling audio and video latency as low as four milliseconds, which developers say is about 42% lower than Fast-DDS. By addressing fragmented standards and duplicated software development, these kinds of open-source robotics platforms help regions build domestic ecosystems for humanoids, industrial automation, and embodied AI without starting from scratch each time.

From Niche Engineering to a Global Robotics Development Community
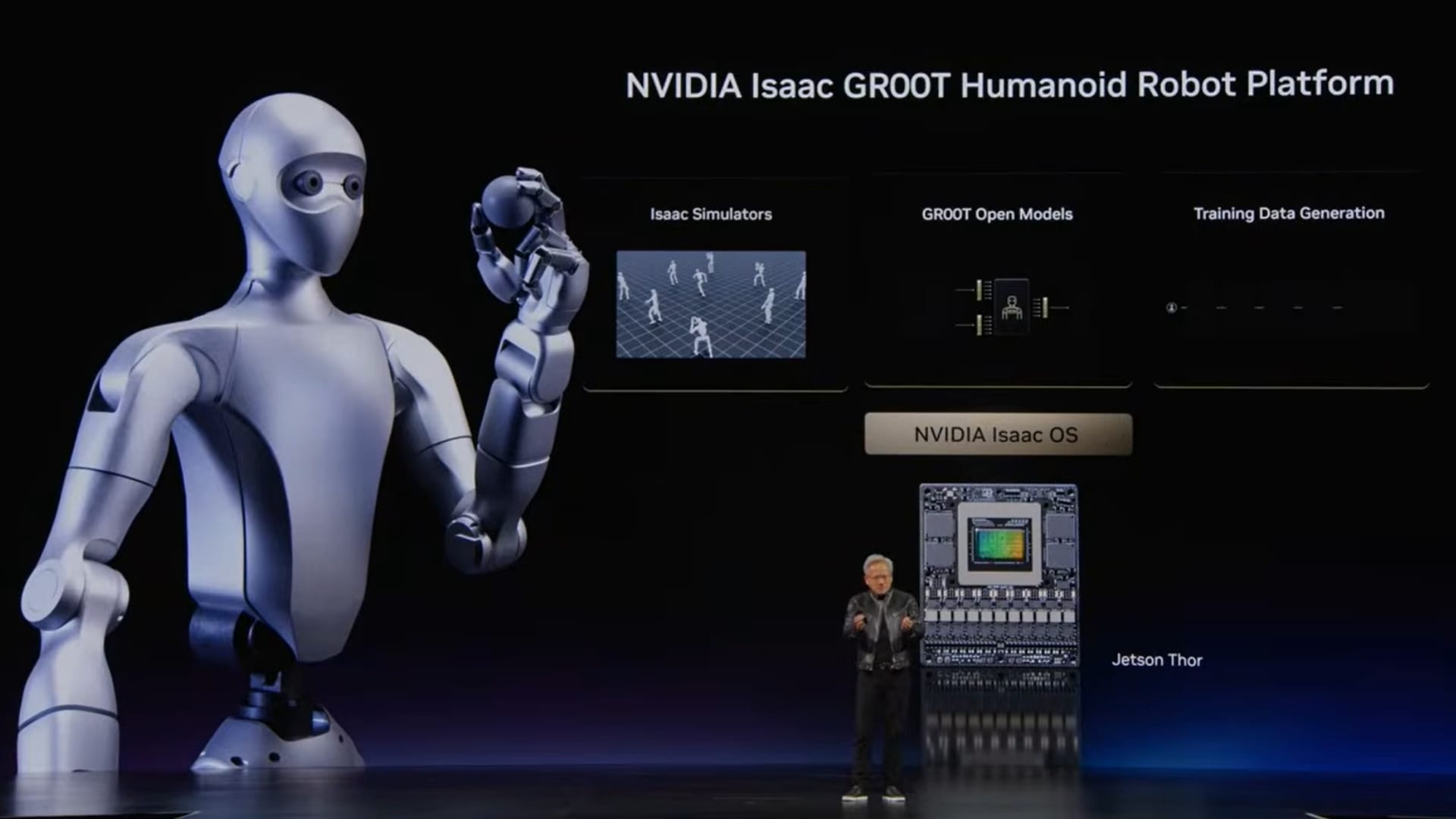
For many years, robotics was an expensive, fragmented niche, where even basic mobile robots demanded custom software and long development cycles. The rise of open-source robotics has changed that dynamic. Shared stacks like ROS and ROS 2, simulation tools, and cloud-based platforms have lowered the entry bar for universities, startups, and makerspaces. Companies such as The Construct built browser-based environments where developers can write code, run ROS, and test robots entirely online, anticipating modern cloud robotics and robotics-as-a-service models. This has encouraged globally distributed education and experimentation, turning robotics into a more accessible discipline. Major firms including Nvidia, Amazon, ABB, and Bosch now contribute back to this open ecosystem, signaling a shift away from closed, proprietary approaches toward a culture where the robotics development community co-creates core infrastructure and accelerates collaborative robotics innovation.
Why Collaborative Development Is Accelerating AI-Powered Robotics Innovation
Open-source robotics is changing the pace of innovation by encouraging shared problem-solving and faster iteration. Instead of isolated teams building entire stacks in-house, developers assemble AI-powered robots from tested open components, then focus their effort on differentiation, such as novel applications or new AI models. At the Robotics Summit & Expo, Open Robotics is inviting engineers to help define an open foundation that blends AI tooling with safety and security practices, creating a base layer others can trust and extend. Meanwhile, distributed systems like M-Robots OS 2.0 show how shared architectures can coordinate fleets of robots and devices, cutting integration work and communication latency. As more educational programs, makers, and startups join this collaborative robotics innovation model, robotics is shifting from a specialist craft toward a broader creative field, where anyone with an idea and basic skills can build meaningful robotic systems.