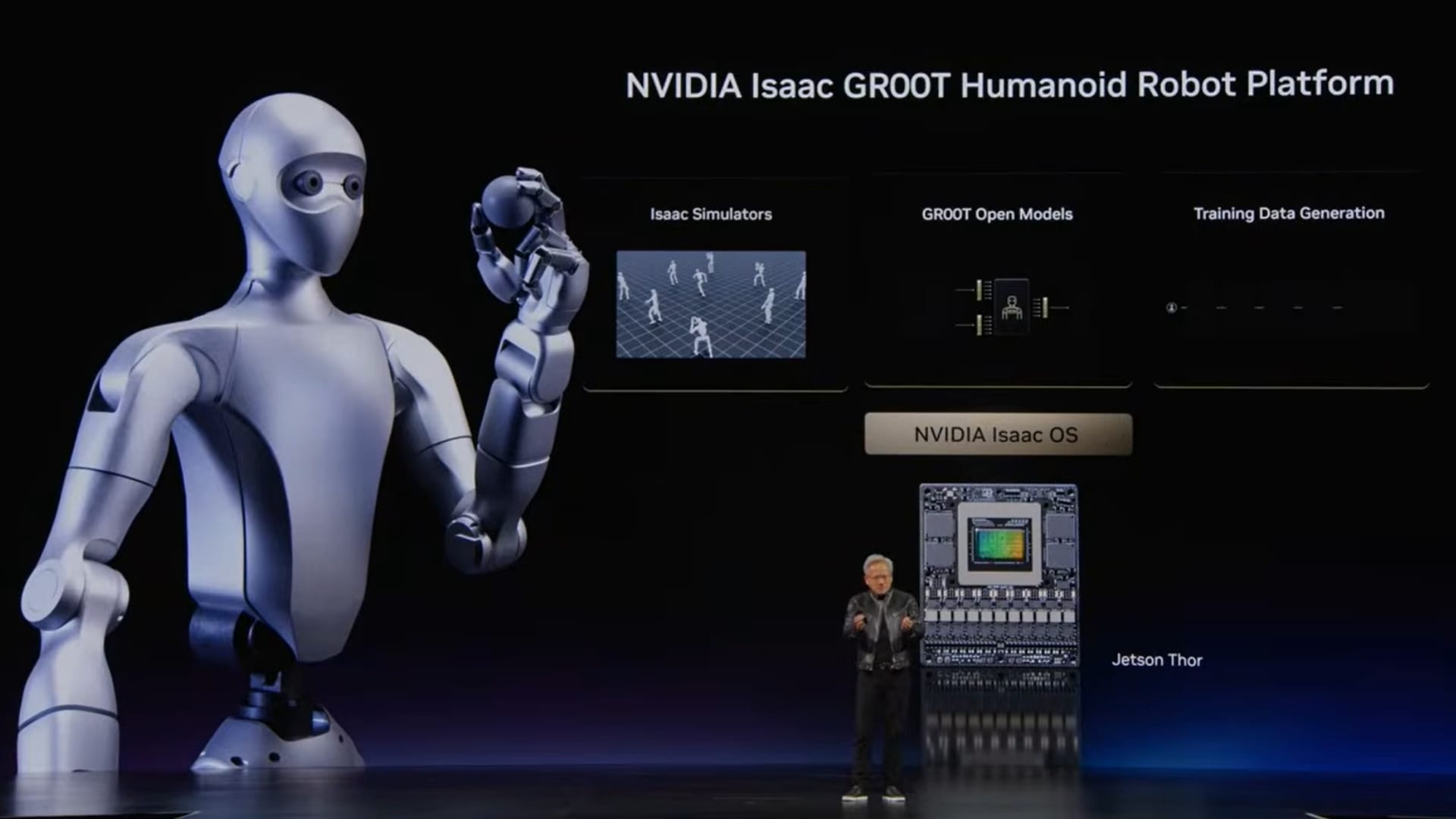
What NVIDIA Isaac GR00T Is and Why It Matters
NVIDIA Isaac GR00T is a humanoid robot reference design that combines a human-scale body, onboard Jetson Thor compute, and an open software stack so researchers and builders can develop practical humanoid skills without designing every component from scratch. Instead of assembling separate chassis, hands, sensors, and compute, they receive a coherent platform built for physical AI research. The robot body is based on the Unitree H2 Plus chassis, nearly six feet tall and about 150 pounds, with 31 degrees of freedom across the body. NVIDIA adds Sharpa Wave tactile five-finger hands, multi-view sensing, and whole-body control tuned for walking, balance, and dexterous manipulation. This open source robotics platform targets academic labs, industrial R&D teams, and independent developers who want a standard, repeatable starting point for humanoid robotics research design rather than bespoke one-off builds that are hard to maintain, compare, or scale.

A Complete Humanoid Robot Reference Design, From Body to Brain
Isaac GR00T’s main contribution is that it packages a full humanoid robot reference design into a single, documented system. The Unitree H2 Plus chassis supplies 31 degrees of freedom for walking, bending, and reaching at human scale, while dual Sharpa Wave tactile hands add 22 more degrees of freedom for fine manipulation. According to Unitree, this configuration brings the robot to 75 degrees of freedom across the body and hands, making it suitable for advanced manipulation and whole-body coordination experiments. Sensors include a wide field-of-view stereo camera in the head, wrist cameras for close-up work, and an inertial measurement unit for balance and motion awareness. Torque ratings reach up to 120 Newton-metres in the arms and 360 Newton-metres in the legs, with each arm rated for a 7 kg payload and up to 15 kg peak loads, giving labs headroom for lifting and interaction tasks.

Jetson Thor Compute and Tactile Hands for Faster Skill Development
At the heart of NVIDIA Isaac GR00T is Jetson AGX Thor T5000, a Jetson Thor compute module designed for high-intensity AI workloads on the robot itself. It integrates an NVIDIA Blackwell GPU with 2,070 FP4 teraflops of AI performance, a 14-core Arm CPU, and 128 GB of unified memory, running within a configurable 40–130 W power envelope. This makes it realistic to train and deploy complex control, perception, and language models directly on the robot. Sharpa Wave tactile five-finger hands expand the platform’s role beyond walking to rich manipulation, including careful handling of fragile or irregular objects that simple grippers struggle with. Combined with multi-view sensing and an onboard battery offering roughly three hours of operation, the system lets teams focus on robot skill development—such as grasping, tool use, or multi-step tasks—without hitting compute limits or needing external tethered workstations.
Open Software Stack: From Simulation to Real-World Testing
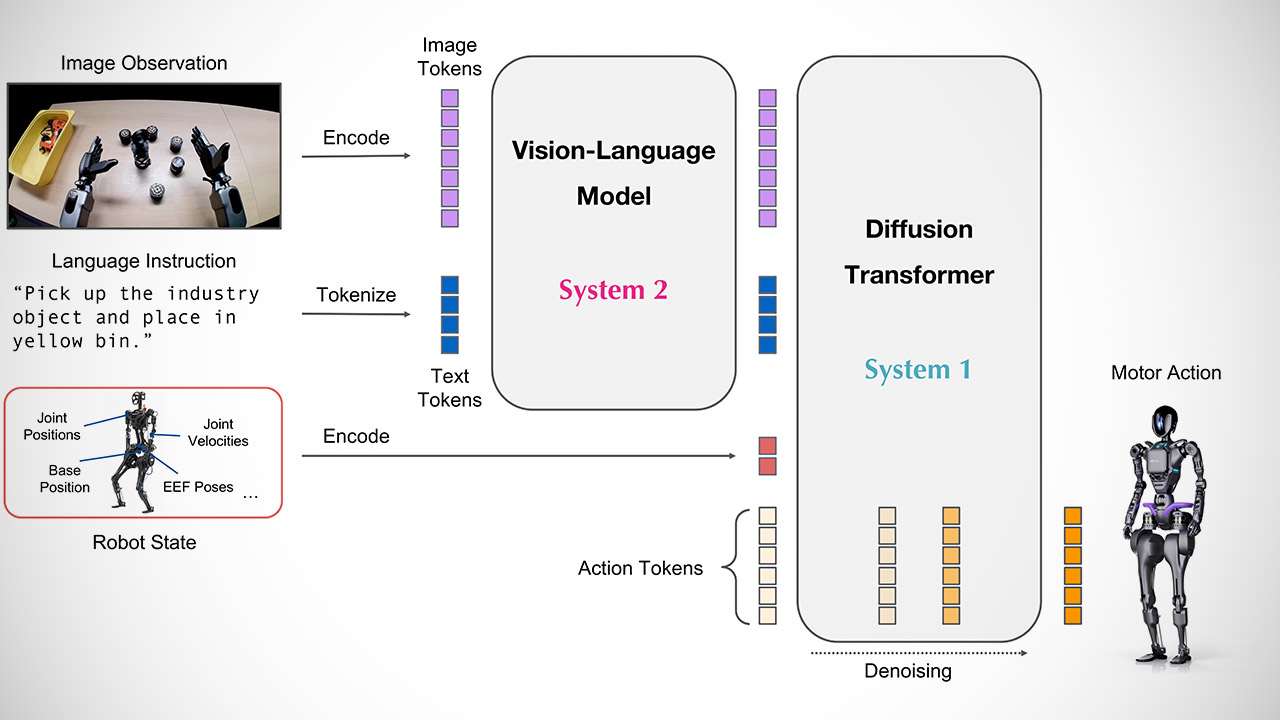
Hardware alone does not democratize humanoid robotics; Isaac GR00T’s software stack is what connects simulation, training, and deployment. The platform integrates Isaac GR00T software and models so researchers can run end-to-end workflows: simulate a new capability, train it with data, validate it in virtual environments, and deploy it on the same humanoid hardware. NVIDIA positions this as a way to unify fragmented pipelines that currently span separate tools for simulation, control, logging, and evaluation. Teams gain access to open models for perception, control, and multi-task management that can process speech commands, camera input, and body state in parallel. This reduces the effort needed to bring up basic locomotion, balance, and manipulation, allowing labs to spend more time on higher-level robotics research design topics like general-purpose physical intelligence, multi-modal policies, and long-horizon task planning across real-world environments.
Democratizing Humanoid Robotics Through an Ecosystem of Builders
Isaac GR00T’s open design is meant to lower the barrier to entry for humanoid robotics research. Instead of tying capabilities to proprietary platforms, NVIDIA publishes a reference design that vendors and labs can adopt or adapt. Unitree’s H2 Plus reference design is the first public example, pairing its human-scale chassis with Jetson Thor compute and Isaac GR00T workflows. As more vendors add compatible bodies, hands, or sensor modules, an ecosystem of interchangeable parts can grow around the same core open source robotics platform. That consistency benefits academic labs, who gain comparable baselines for experiments, and independent builders, who can reuse community-tested designs rather than reinvent each subsystem. By aligning hardware, compute, and software in a single reference, Isaac GR00T creates a shared starting point that can accelerate both incremental improvements and ambitious new approaches to humanoid design and control.