What Isaac GR00T Is and Why It Matters
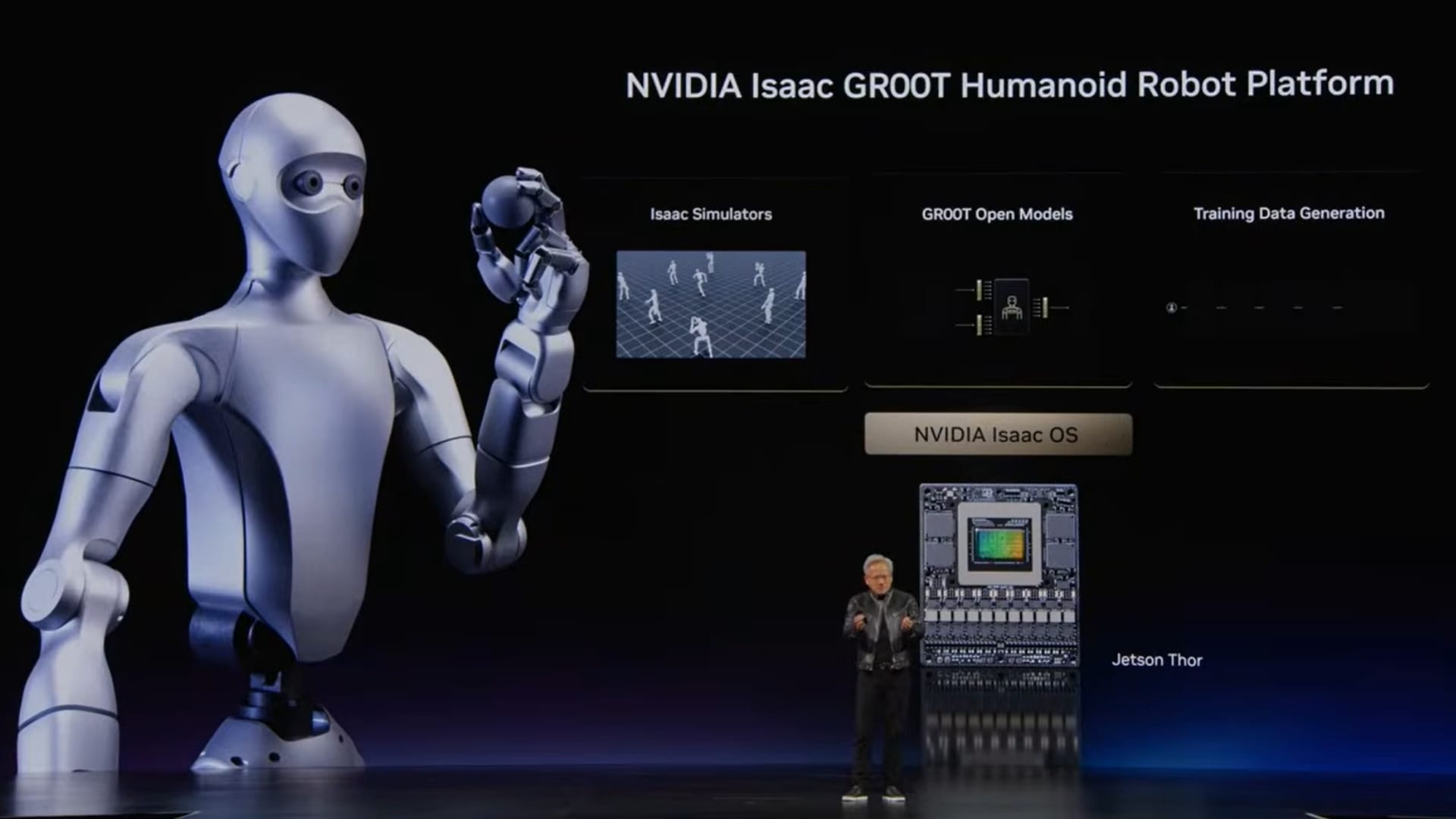
The Isaac GR00T humanoid robot is an open reference platform from NVIDIA that combines a Unitree H2 Plus humanoid body, dexterous tactile hands, Jetson Thor onboard compute and a full Isaac GR00T software stack into a shared system for developing, simulating, and deploying advanced physical AI behaviors. Announced at NVIDIA GTC Taipei, the platform targets one of humanoid robotics’ biggest bottlenecks: fragmented workflows across hardware integration, data collection, humanoid robot simulation, training, and deployment. Instead of each lab building a custom stack, NVIDIA offers a common design that can be cloned, extended, or adapted. For researchers and builders, this promises faster iteration and more comparable results across teams working on general-purpose humanoids. It also signals how AI, robotics, and digital manufacturing are converging into a “robotics renaissance” centered on standardized, high-performance humanoid systems.
Jetson Thor and a 75-DOF Humanoid Body for Physical AI Research
At the hardware level, the Isaac GR00T humanoid robot combines a human-scale Unitree H2 chassis with Sharpa Wave tactile five-finger hands to reach 75 degrees of freedom across body and hands. The H2 stands nearly 6 feet tall, weighs about 150 pounds, and offers 31 degrees of freedom for bipedal locomotion and upper-body movement, while each Sharpa Wave hand contributes fine-grained manipulation capability. NVIDIA’s Jetson AGX Thor T5000 module sits at the core, pairing a Blackwell GPU rated at 2,070 FP4 teraflops for AI with a 14-core Arm CPU and 128 GB of unified memory. According to NVIDIA, this compute stack supports real-time whole-body control with arm torques up to 120 N·m, leg torques up to 360 N·m, and an arm payload that peaks at 15 kg. Onboard sensing includes stereo vision, wrist cameras, IMU, microphones, and speakers for perception and interaction.
Isaac GR00T Software Stack: From Teleop Data to Deployed Policies
Beyond hardware, the Isaac GR00T platform is designed as an open source robotics platform for end-to-end humanoid development. Isaac Teleop captures demonstration data that can train control policies and manipulation skills, while NVIDIA’s Isaac GR00T open foundation models target humanoid reasoning, learning, and multitask behavior. Isaac Sim and Isaac Lab provide high-fidelity humanoid robot simulation, training, and evaluation before any skill is sent to physical robots. Once validated, policies move through Isaac ROS middleware and run on Jetson Thor for real-time inference and control. The stack is modular, so labs can adopt parts—such as simulation or teleoperation—without replacing existing tools. This closes the loop from data to deployment in a single ecosystem and helps research teams keep control of robot data, training datasets, telemetry, and logs while still benefiting from NVIDIA’s shared infrastructure and models.

Democratizing Humanoid Development and Accelerating Physical AI
The Isaac GR00T humanoid robot is positioned as a reference design that lowers the barrier to advanced humanoid research. Instead of depending on proprietary systems, labs can standardize on a shared body plan, sensing layout, and Jetson Thor robotics compute, then focus effort on algorithms, behaviors, and physical AI research. Jensen Huang said, “Humanoid robots will bring physical AI to the world’s largest industries, opening a multitrillion-dollar economic opportunity.” Leading groups including Ai2, ETH Zurich’s Robotic Systems Lab, Stanford Robotics Center, and UC San Diego’s Advanced Robotics and Controls Laboratory have already committed to using the platform. NVIDIA also plans support for the smaller Unitree G1, extending the same Isaac GR00T workflow to a wider community. As more teams adopt compatible hardware and software, results should become easier to reproduce, compare, and build on, accelerating progress toward general-purpose humanoid capabilities.
A Common Platform for the Robotics Renaissance
Isaac GR00T’s significance goes beyond one robot configuration. It reflects a broader shift in robotics toward standardized, open platforms that merge AI, simulation, and digital manufacturing. With a high-performance Jetson Thor brain, a flexible 75-degree-of-freedom body, and tightly integrated tools for data collection and humanoid robot simulation, the reference design acts as a testbed for physical AI in real environments. For startups, labs, and industrial R&D teams, this can shorten the path from algorithm to field trial while avoiding bespoke hardware for every project. As ecosystem partners such as Sharpa integrate tactile hands and other components, the platform may grow into a de facto benchmark for dexterous humanoid manipulation. If adoption continues, Isaac GR00T could anchor a new generation of open, reproducible physical AI research that pushes humanoids from lab prototypes toward reliable, general-purpose machines.