Open-Source AI Hardware: From Code to Objects That Move
Open source AI hardware describes physical platforms, components, and reference designs that combine artificial intelligence with open designs so anyone can study, modify, and build embodied systems that sense, think, and act in the real world. Instead of keeping AI locked inside cloud services or browser tabs, these projects anchor models in robots, desk companions, and modular kits that respond to touch, voice, and motion. A new wave of embodied AI robotics spans high-end humanoid robot platforms, compact ESP32 AI projects, and AI hardware hackathon events where teams prototype devices over a weekend. Their common thread is transparency: schematics, firmware, and software stacks are shared publicly, lowering the bar for researchers, hobbyists, and students. Together they shift AI experimentation from closed labs to workbenches, classrooms, and community spaces where physical AI becomes a hands-on craft.
Nvidia’s Isaac GR00T: A Reference Humanoid Robot Platform for Physical AI
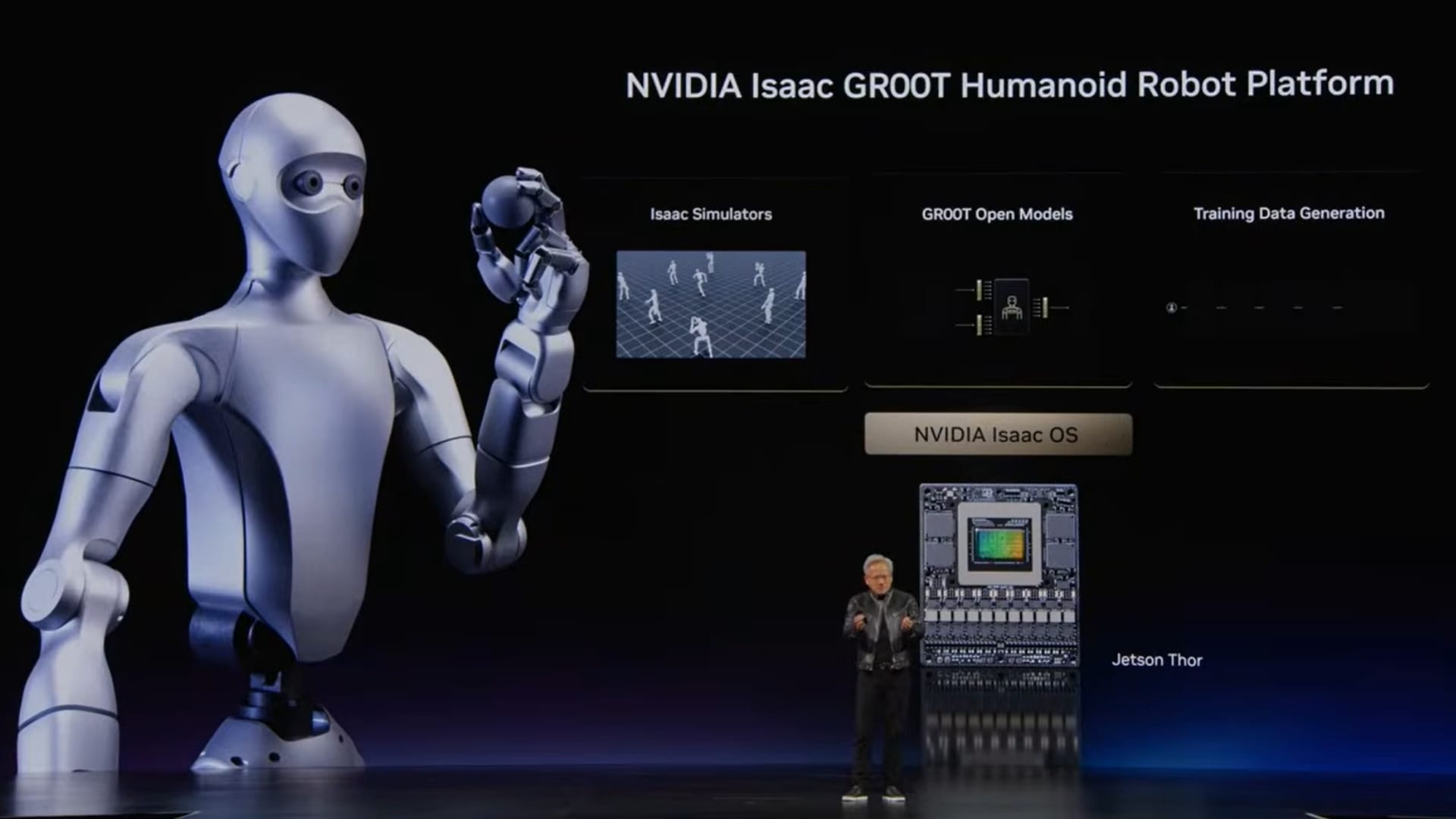
Nvidia’s Isaac GR00T Reference Humanoid Robot is pitched as a complete humanoid robot platform for embodied AI robotics research. Built around a Unitree H2 Plus humanoid robot with 31 degrees of freedom and dual Sharpa Wave tactile hands with 22 degrees of freedom each, it bundles serious mechanics with Nvidia Jetson AGX Thor onboard computing powered by a Blackwell GPU. The GR00T software stack ties the humanoid robot platform together: Isaac Teleop for data collection, Isaac Sim and Isaac Lab for simulation and training, Isaac ROS for deployment, and Nvidia’s open foundation models for behavior. According to Nvidia founder and CEO Jensen Huang, “The Nvidia Isaac GR00T Reference Humanoid Robot gives researchers a single, open platform to make breakthrough discoveries toward general-purpose physical intelligence.” For labs that once had to assemble custom rigs piece by piece, this is a turnkey, modifiable baseline.
Kira and ESP32 AI Projects: Retro Hardware as Open Desk Companions
On the other end of the scale, the Kira project turns a miniature replica of the original 1984 Macintosh into an open-source AI desk companion driven by accessible components. Designer Alisher Ashimov places an expressive OLED face and voice-activated assistant features inside a tiny beige enclosure that carefully matches the classic Macintosh silhouette, right down to rounded corners, recessed display area, and decorative floppy drive. While full specifications are still emerging, Kira sits squarely in the world of ESP32 AI projects and other maker builds, showing how a low-power microcontroller plus open models can turn retro hardware into a characterful assistant. Instead of anonymous smart speakers, Kira offers a nostalgic, object-like presence that invites tinkering. Its open-source foundation means enthusiasts can inspect the design, remix the enclosure, swap models, and extend the interface—treating AI hardware as a creative material rather than a sealed appliance.

Axiometa x Anthropic: An AI Hardware Hackathon for Embodied Systems
Axiometa and Anthropic are taking embodied AI off the screen with a London AI hardware hackathon running from 5:30 p.m. on July 17 to 5:30 p.m. on July 19, 2026. Approved teams will work with Axiometa’s modular hardware—cameras, sensors, motors, displays, signals, and controls—tied into AI systems that operate in the physical loop. The organizers highlight examples such as a camera tracking a hand to control a servo, environmental sensors reporting temperature, humidity and air quality over Wi-Fi, and a voice assistant that can listen, transcribe, and respond. Fatema Al Khalifa, CEO of Unicorn Mafia, framed the event with a clear challenge: “For too long, AI has been trapped behind a screen.” With no fixed requirement yet on which Anthropic models to use, the AI hardware hackathon encourages builders to mix and match tools, focusing on behavior and interaction rather than a single vendor stack.

Why Open Source AI Hardware Matters for the Future of Physical Intelligence
Taken together, Nvidia’s GR00T humanoid robot platform, maker-friendly ESP32 AI projects like Kira, and community events such as the Axiometa x Anthropic embodied AI hardware hackathon signal a shift in how physical AI is built. High-end research labs gain a shared open reference design for humanoid robotics, while hobbyists get approachable desk companions and modular kits they can print, solder, and code themselves. Open source AI hardware turns embodied AI robotics into a continuum: from a five-fingered humanoid hand in simulation to a tiny Macintosh-inspired assistant on your desk. This democratizes experimentation, spreads skills across more people, and helps new ideas surface outside traditional corporate pipelines. As designs, firmware, and AI models circulate, physical AI looks less like a black box product and more like an evolving ecosystem that anyone with curiosity—and a workbench—can join and improve.