What an Affordable 3D Printed Humanoid Robot Looks Like
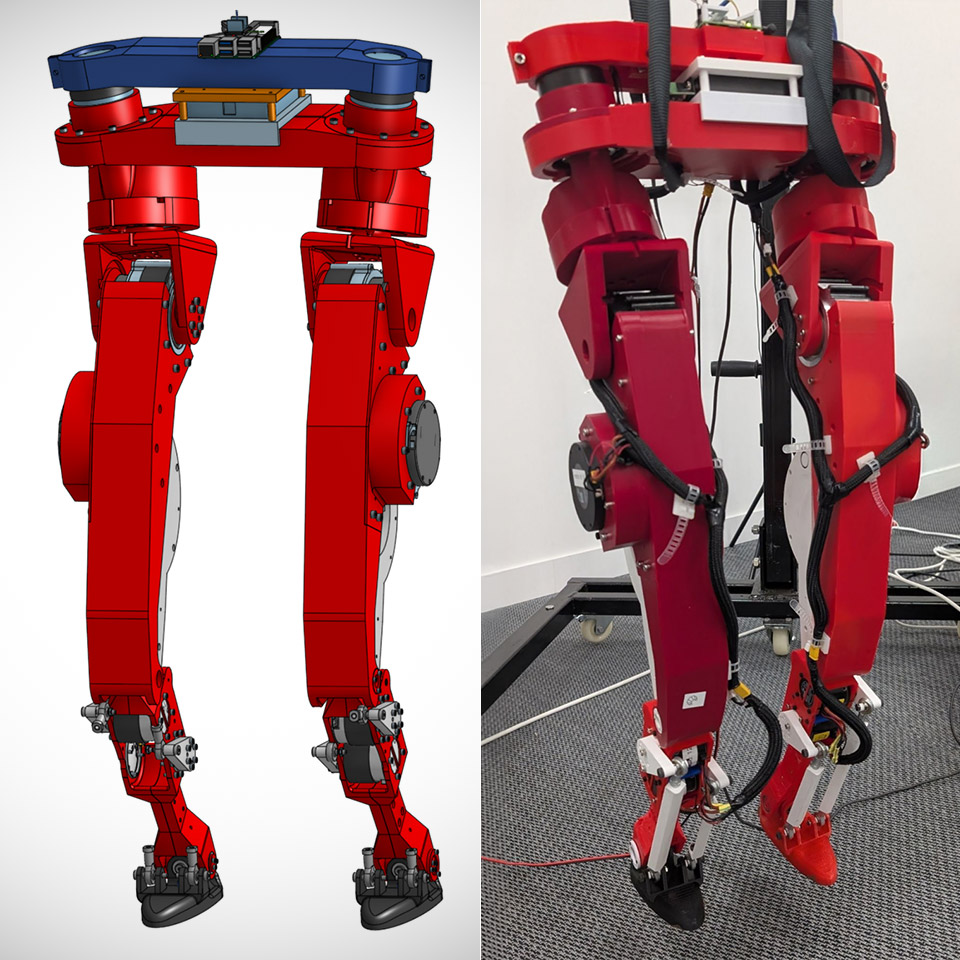
An affordable 3D printed humanoid robot is a bipedal machine built from downloadable CAD files, common actuators, and off‑the‑shelf electronics that any maker can assemble and program without industrial‑grade tools or large budgets. Hugging Face has released a complete open-source robotics platform that fits this description: a bipedal robot that costs roughly USD 2,500 (approx. RM11,500) in parts and relies mostly on 3D‑printed pieces plus standard actuators and electronics. Builders start from 75 printable files forming the torso and both legs, organized into modular hip, thigh, knee, shin, ankle, and foot sections. This is a DIY humanoid robotics platform, not a closed commercial product. You print, assemble, and tune the machine yourself, using a Raspberry Pi 5, an IMU sensor, and a CAN FD adaptor to coordinate the limbs and enable stable, repeatable walking experiments at home or in a small workshop.
Tools, Parts, and Files You Need Before Printing
To start affordable robot building with this open-source robotics platform, you first gather the digital and hardware essentials. Download the 75 STL files and examine the public Onshape CAD model so you understand how the hip mechanisms, thighs, knees, shins, ankles, and feet align during bipedal robot assembly. This model lets you adapt geometry for your own 3D printed robot designs. On the hardware side, you will need twelve RobStride actuators—two O0 units near the torso, two O2 units for hip rotation, four O3 units for the thighs, and four O5 units for the shins—plus an IMU sensor, a Raspberry Pi 5, and a twin‑channel CAN FD adaptor for communication. According to Hugging Face’s documentation, all structural components can be re‑printed in PLA+ when parts wear out, which makes this platform especially attractive for tinkerers and small lab teams.
Printing and Preparing the Mechanical Structure
Once the files are ready, you can print the robot in sections to keep the process manageable. Start with the torso shells and hip mechanisms, then move down through thighs, knees, shins, ankles, and feet. Modular sections let you pause, inspect tolerances, and refine your 3D printer settings before committing to the full DIY humanoid robotics build. PLA+ filament is sufficient for most structural parts and is easy to reprint if a link or cover breaks. While the design is optimized for consumer‑grade printers, pay attention to layer orientation around high‑stress joints like knees and hips. Treat each module as a sub‑assembly: dry‑fit screws, bearings, and mounting points without motors first. This reduces surprises later when you integrate actuators and wiring, and it keeps the bipedal robot assembly process predictable even for first‑time builders.
Wiring, Motor Setup, and Safe First Power‑Up
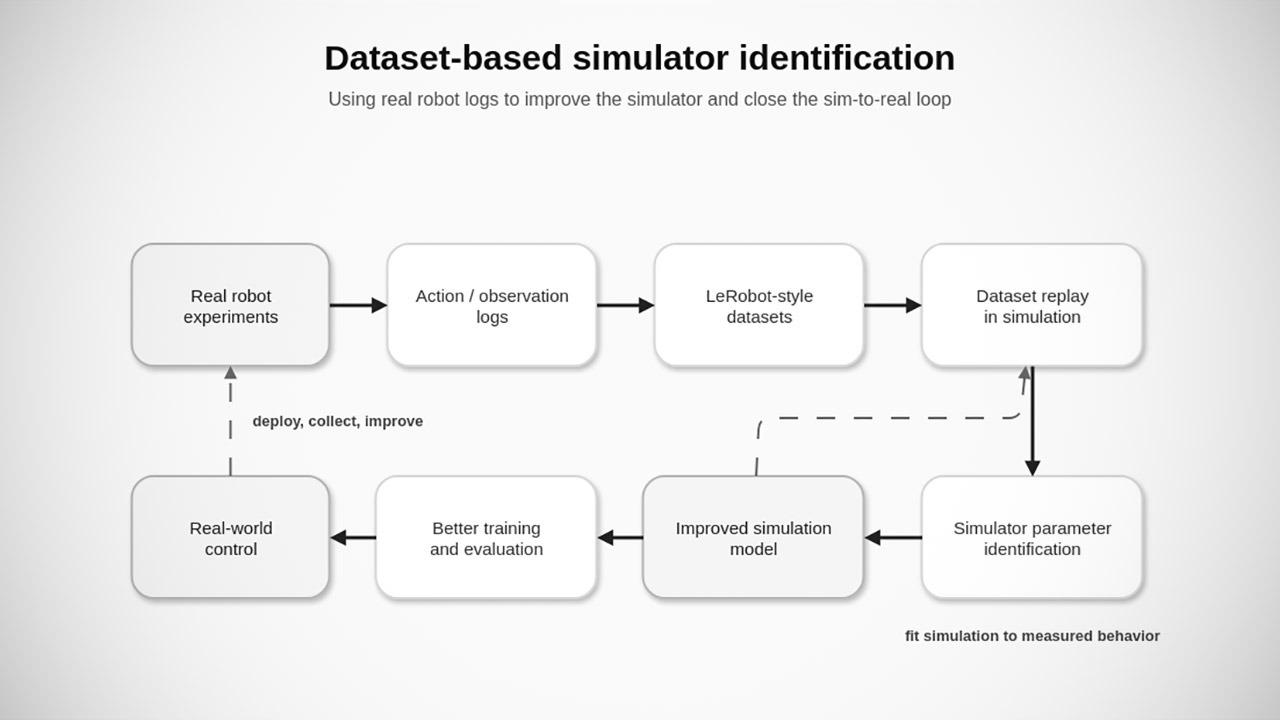
The electronics workflow centers on CAN‑based communication between the Raspberry Pi 5 and the twelve RobStride actuators. Following the open-source documentation, you initially connect each motor to the main computer over the CAN bus using pre‑written scripts before installing them into the printed frame. This step confirms that every actuator responds correctly and that the twin‑channel CAN FD adaptor is wired as intended. The process includes explicit tests to ensure power is delivered to all components while preventing the robot from lurching to life unexpectedly. You effectively build a bench‑top test rig to validate current draw, motor direction, and sensor feedback. Once each channel passes, you mount actuators into their hip, thigh, and shin modules, route cables through the torso, and secure the IMU sensor at a stable point so it can monitor the robot’s posture in real time.
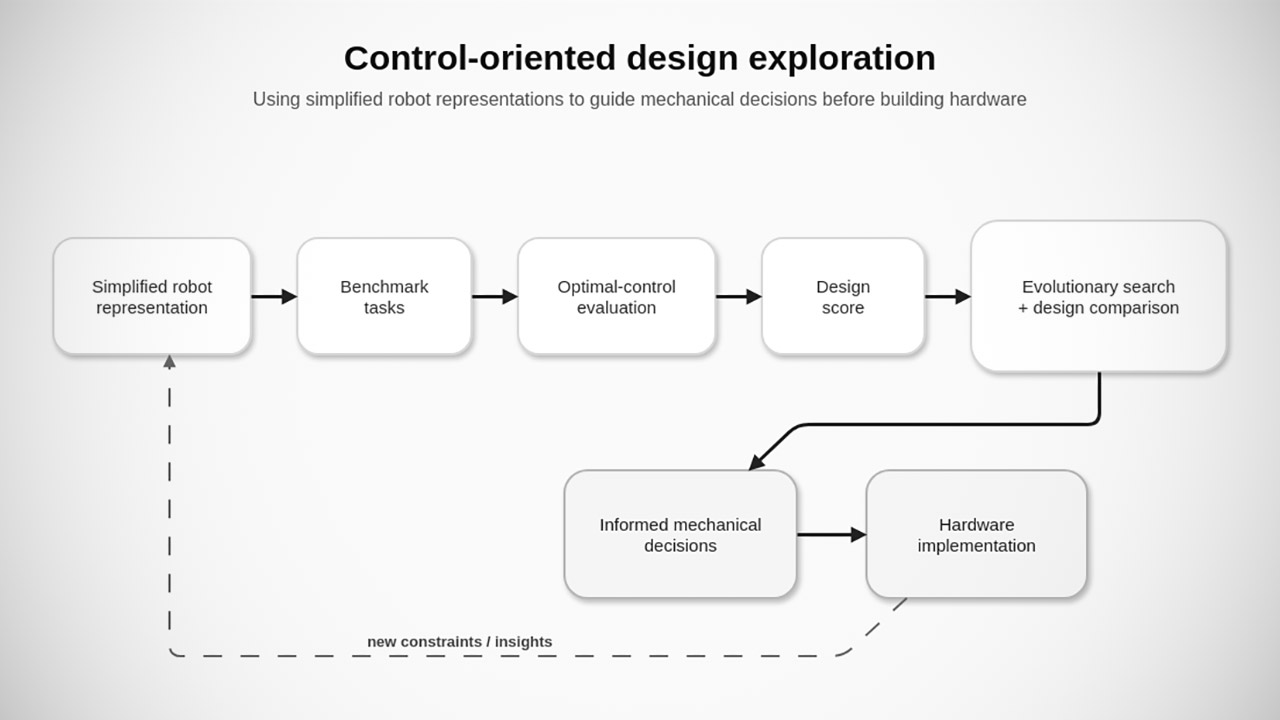
Teaching Your Robot to Stand, Walk, and Evolve
After basic wiring and CAN tests, you can move into motion. The open-source robotics community around ROS and similar tools gives you reusable packages for balance control, gait generation, and simulation, making DIY humanoid robotics far more approachable. You begin with standing poses, using the IMU sensor to keep the center of mass over the feet. Then you progress to slow, supported steps, logging data from each RobStride actuator to refine joint trajectories. Over time, you can port these routines into a ROS‑based stack or a browser‑native environment inspired by platforms like The Construct. This approach lets you reuse community code, adjust parameters in simulation, and upload refined gaits back to your physical 3D printed robot. In this way, a USD 2,500 (approx. RM11,500) parts list becomes a capable walking research platform for individual makers.