What the Isaac GR00T Open Humanoid Robot Design Actually Is
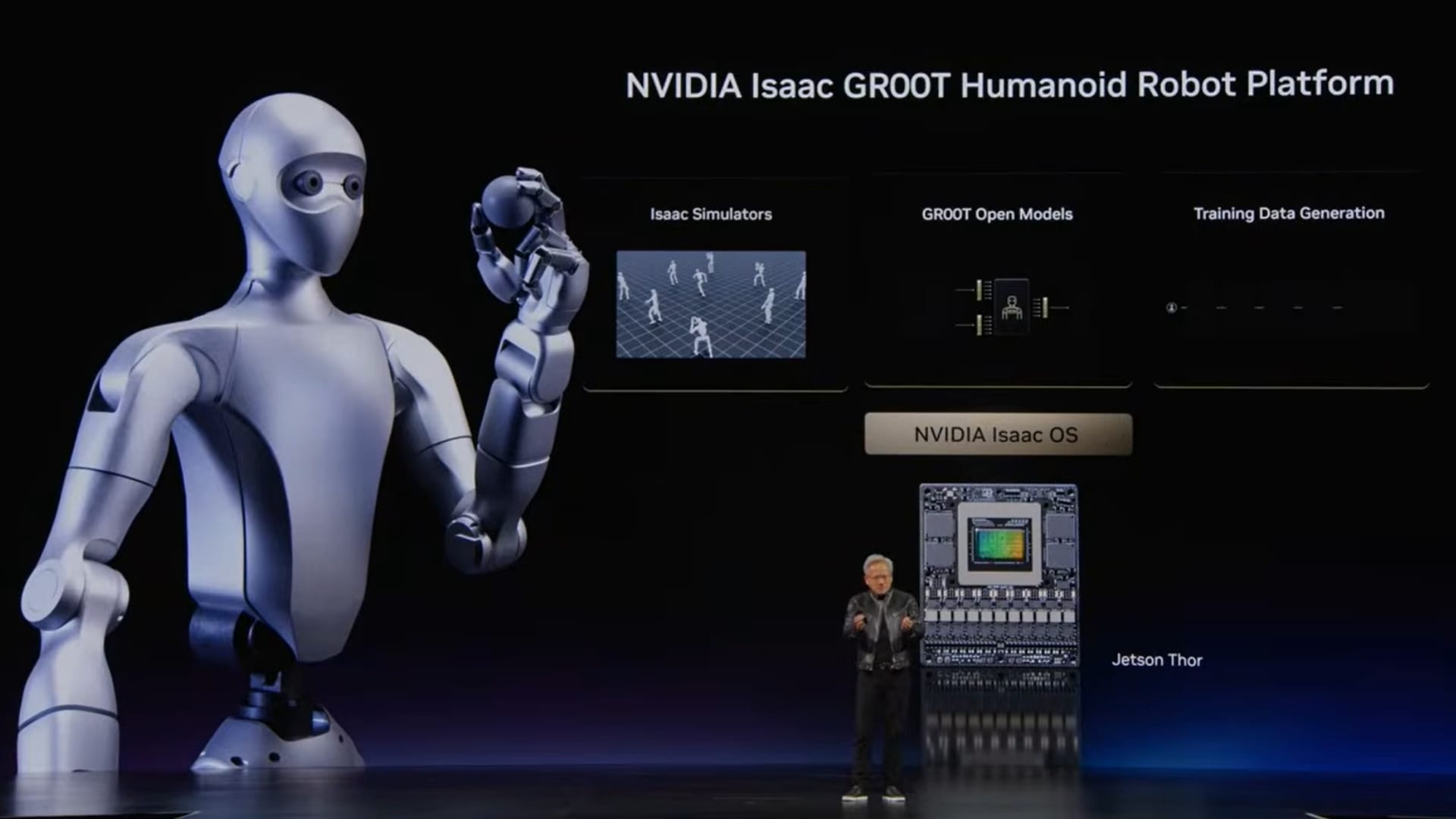
NVIDIA Isaac GR00T is an open humanoid robot design that combines a human-scale body, onboard AI compute, and a full software stack into a single, reproducible robotics research platform for academic institutions and startups. Instead of sourcing motors, sensors, computers, and control software separately, labs receive a complete “body plus brain” template that can be studied, modified, and shared. The reference system blends the Unitree H2 or H2 Plus humanoid chassis, Sharpa Wave tactile five‑finger hands, NVIDIA Jetson AGX Thor compute, and Isaac GR00T software models. This open humanoid robot design aims to cut the time and risk between unpacking hardware and training practical skills such as walking, grasping, and tool use. By publishing a common blueprint, NVIDIA turns what used to be custom, proprietary stacks into a shared baseline that different institutions can replicate and compare.

Lowering Barriers: One Integrated Robotics Research Platform
Humanoid robotics has long been fragmented: one vendor for legs, another for hands, and yet another for compute, with separate teams gluing everything together. Isaac GR00T attacks that friction by defining an integrated robotics research platform grounded in the Unitree H2 Plus chassis, tactile hands, high‑performance compute, and ready‑to‑use software workflows. Research groups now avoid months of hardware integration and can focus on learning, control, and real‑world experiments. According to NVIDIA founder and CEO Jensen Huang, “The NVIDIA Isaac GR00T Reference Humanoid Robot gives researchers a single, open platform to make breakthrough discoveries toward general-purpose physical intelligence.” By standardizing the base configuration, the platform makes experiments more reproducible and results easier to compare across labs, pulling humanoid research away from one‑off prototypes and toward a shared community benchmark that small teams can afford to adopt.
Unitree H2 Plus: Proof of Concept for Open Humanoid Design
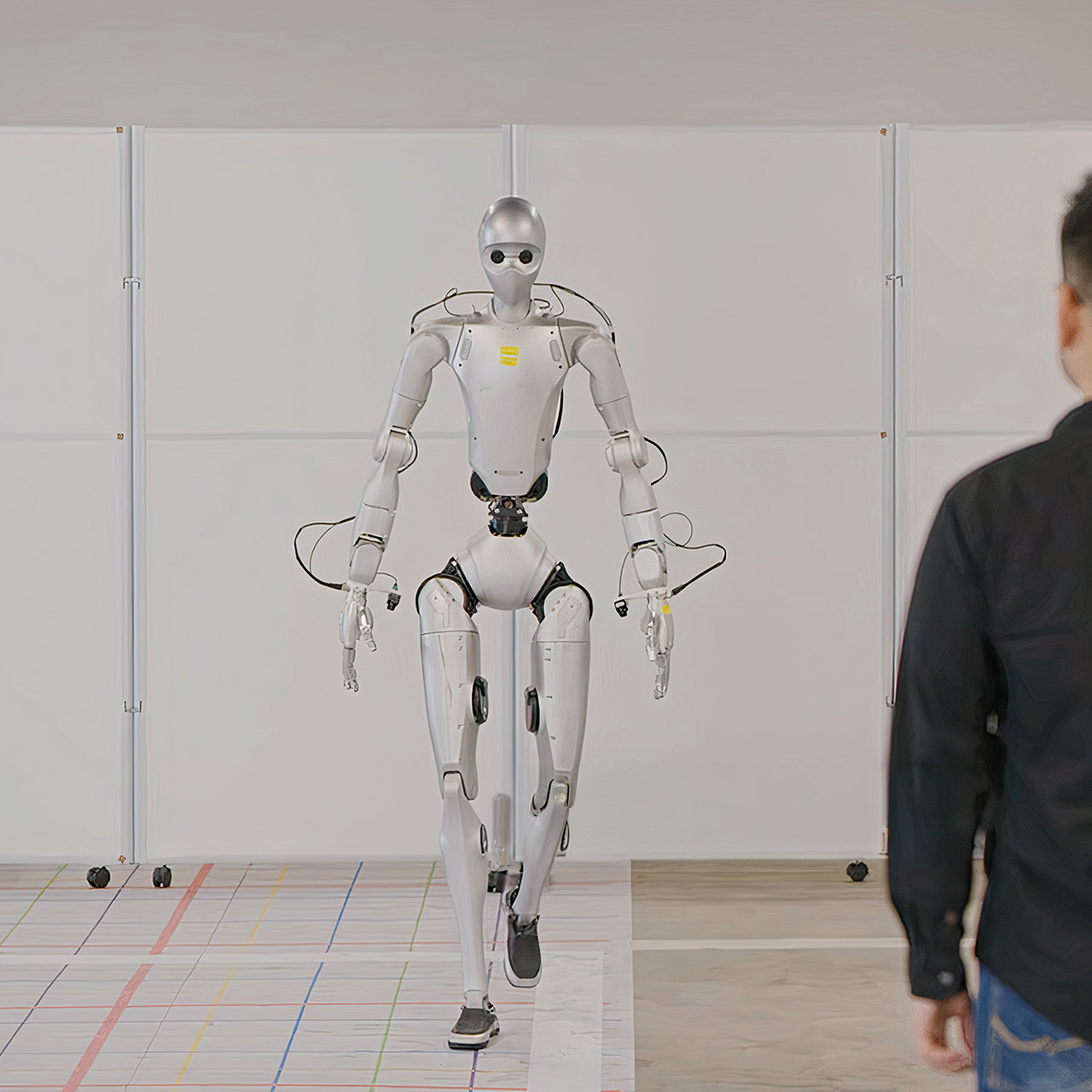
Unitree’s H2 Plus shows how the Isaac GR00T reference can turn into a concrete, shippable humanoid robot. Built on the NVIDIA Isaac GR00T development platform, H2 Plus pairs a nearly six‑foot, 150‑pound H2 body with dual Sharpa Wave tactile five‑finger hands and Jetson Thor compute. The result is a human-scale machine with up to 75 degrees of freedom, whole‑body control, and arm torque up to 120 Newton‑meters and leg torque up to 360 Newton‑meters. NVIDIA reports a rated arm payload of 7 kilograms and a peak payload of 15 kilograms, giving ample headroom for manipulation experiments. Because H2 Plus inherits Isaac GR00T’s open software workflows, labs can reuse the same simulation, training, and evaluation tools rather than reinventing them. This tight coupling of open source robotics hardware concepts with standardized compute and software shortens the path from idea to physically tested skill.

Open Source Robotics Hardware, Software Stacks, and Collaboration
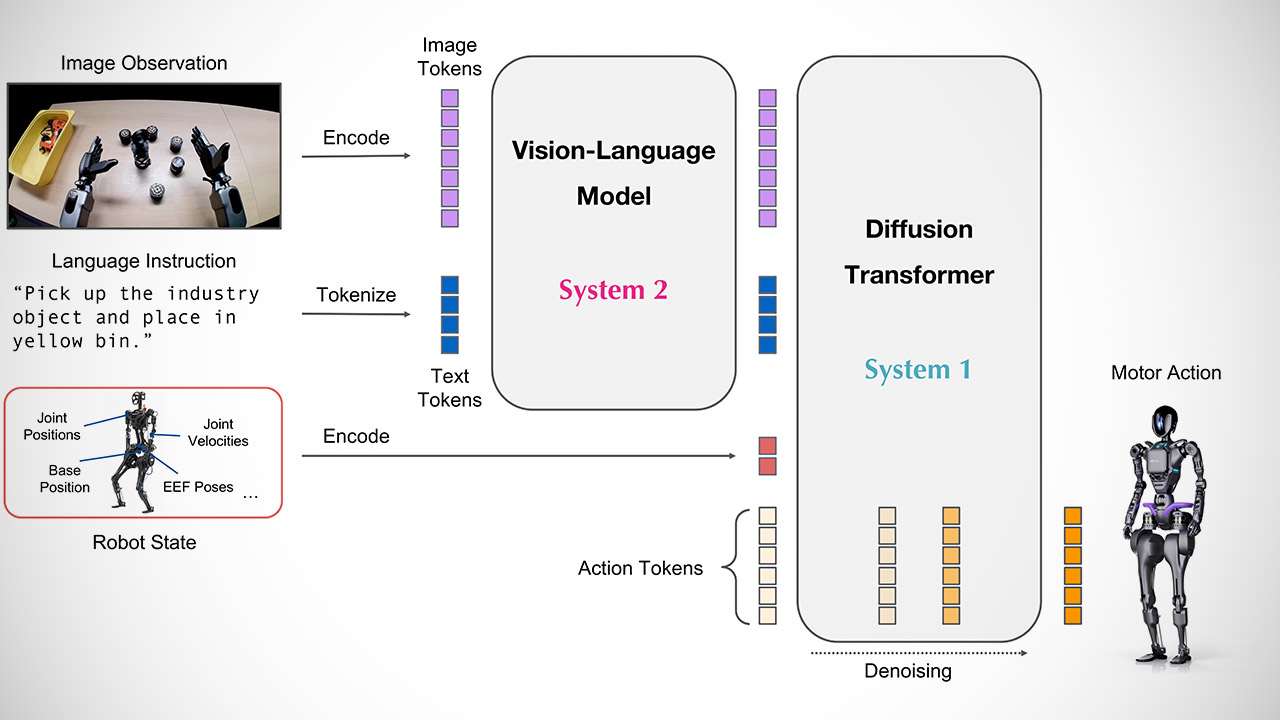
The Isaac GR00T reference is not only about aluminum and actuators; its value lies in an open software stack that binds the machine together. Built around the Jetson AGX Thor T5000 module, the platform delivers an NVIDIA Blackwell GPU with 2,070 FP4 teraflops of AI performance, a 14‑core Arm CPU, and 128 GB of unified memory, backed by Ethernet, Wi‑Fi 6, Bluetooth 5.2, and USB connectivity. On top of this, NVIDIA provides multi‑modal models for perception, language, and control, plus integration paths into existing frameworks such as ROS, so teams can plug into familiar development tools. Because the open humanoid robot design is consistent across institutions, code, datasets, and experiments can be exchanged more easily. In practice, this transforms Isaac GR00T into a shared open source robotics hardware and software ecosystem that encourages collaboration rather than siloed, proprietary development.
From Proprietary Flagships to Accessible Humanoid Robotics Platforms
Historically, the most capable humanoid systems were corporate flagships: powerful but closed, expensive, and tough for outside researchers to access or modify. Isaac GR00T shifts this pattern by turning a corporate-grade stack into an open Isaac GR00T reference that others can stand on. With H2 Plus as a leading example, startups and universities gain a blueprint that already solves locomotion, perception, manipulation, and compute integration. They can then test new control policies, reinforcement learning pipelines, or dexterous tasks without rebuilding the base platform. The inclusion of an emergency stop, battery capable of several hours of runtime, and rich sensor suite makes the robot suitable for continuous lab work and real‑world trials. Over time, such accessible, reproducible humanoid robotics research platforms can push innovation out of a handful of corporate labs and into a wider community of teams experimenting in parallel.