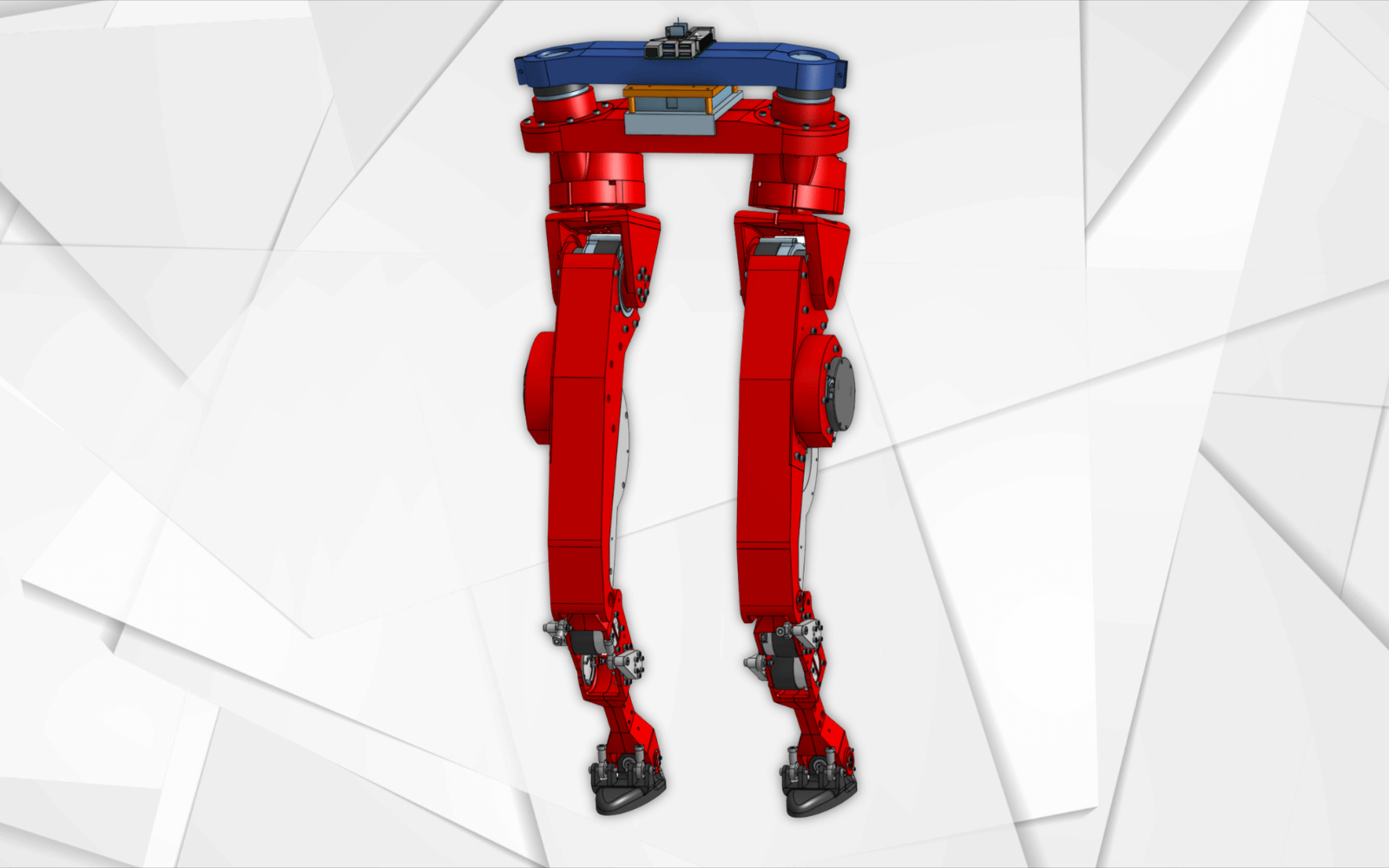
What an Affordable DIY Humanoid Robot Looks Like Today
A DIY humanoid robot in this context is a bipedal, software-controlled machine built from 3D printed parts and off-the-shelf electronics that hobbyists, students, and researchers can assemble and program at home without industrial manufacturing tools. Hugging Face’s LeRobot Humanoid shows how accessible this has become: it is a pair of robotic legs plus torso components that you print from 75 STL files, then finish with standard actuators, a Raspberry Pi 5, and sensors. According to TechEBlog, the platform “costs roughly $2,500 in parts and relies mostly on 3D-printed pieces plus common actuators and electronics.” Unlike toy kits, it is meant for real robot-learning experiments, motion control research, and advanced STEM projects rather than casual play. You are not buying a sealed product; you are downloading an open-source robot plan and turning filament and code into a working 3D printed robot.
Why Open-Source Robot Plans Change Who Can Build Robots
Until recently, capable legged robots were mostly the domain of well-funded labs and companies paying far more than hobby budgets for hardware and software. Open-source robot plans flip that script by sharing CAD models, firmware, and control code so anyone with the right tools can reproduce the same platform. Projects like Berkeley Humanoid Lite and LeRobot Humanoid publish their mechanical designs and part lists rather than hiding them behind proprietary enclosures. The LeRobot team describes their platform as “an open humanoid platform that is affordable enough to reproduce, simple enough to modify, and complete enough to support real robot-learning experiments.” This openness means students can inspect joints in an online Onshape CAD model, researchers can fork locomotion algorithms, and makers can add an upper body or grippers. Community contributions then flow back into the design, pushing affordable robotics projects forward for everyone.
Planning Your Build: Tools, Budget, and Expectations
Before you start printing parts for a DIY humanoid robot, you need a realistic picture of the requirements. First is hardware: a reliable FDM 3D printer, 3.5–4 kg of PLA+ filament, a compatible Raspberry Pi 5, an IMU sensor, a twin channel CAN FD adaptor, and twelve RobStride actuators in the sizes specified by the LeRobot Humanoid design. Budget-wise, TechEBlog reports that Hugging Face’s platform comes in at roughly $2,500 in components, while Stuff notes other downloadable robots like Berkeley Humanoid Lite can cost around R100,000 in parts. You also need time and patience: expect to wire motors, run calibration scripts, and reprint pieces that wear or warp. Treat the project as an experiment and a learning tool, not a finished consumer product, and you will be better prepared for tuning, failures, and upgrades.
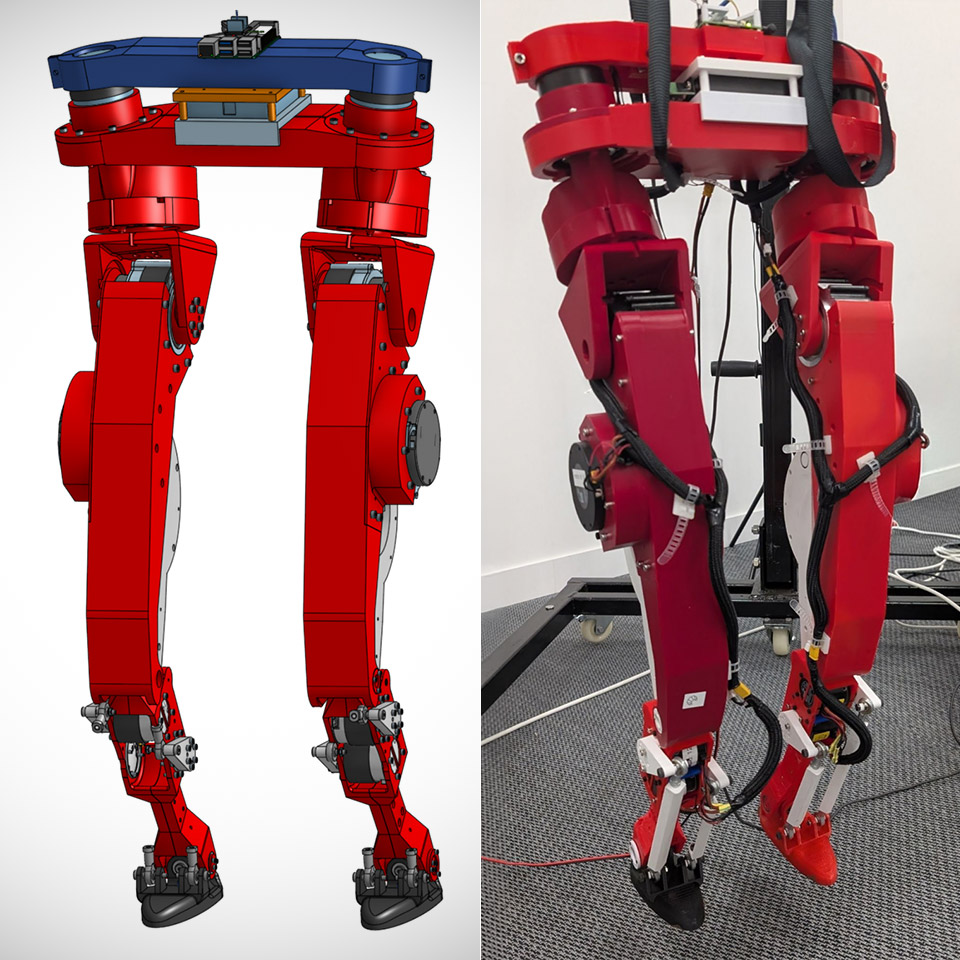
From STL Files to Standing Robot: Build and Test Workflow
The build process for a 3D printed robot follows a clear workflow: design review, printing, electronics setup, mechanical assembly, then calibration and control. Start by examining the public Onshape CAD model to understand how hips, knees, shins, and feet fit together and to make any custom tweaks. Print the 75 parts that form the legs and torso modules, checking tolerances as you go. Before final assembly, follow the recommended sequence from the LeRobot Humanoid documentation: connect each RobStride actuator to the Raspberry Pi 5 via CAN bus using the provided scripts, test power delivery, and confirm that motors respond safely. Only then install them into the hip, thigh, shin, and ankle shells. With everything bolted up, you use the included calibration procedures to align joints and sensors so the robot can stand and move without sudden lurches or falls.
Using 3D Printing and Open Software to Keep Improving
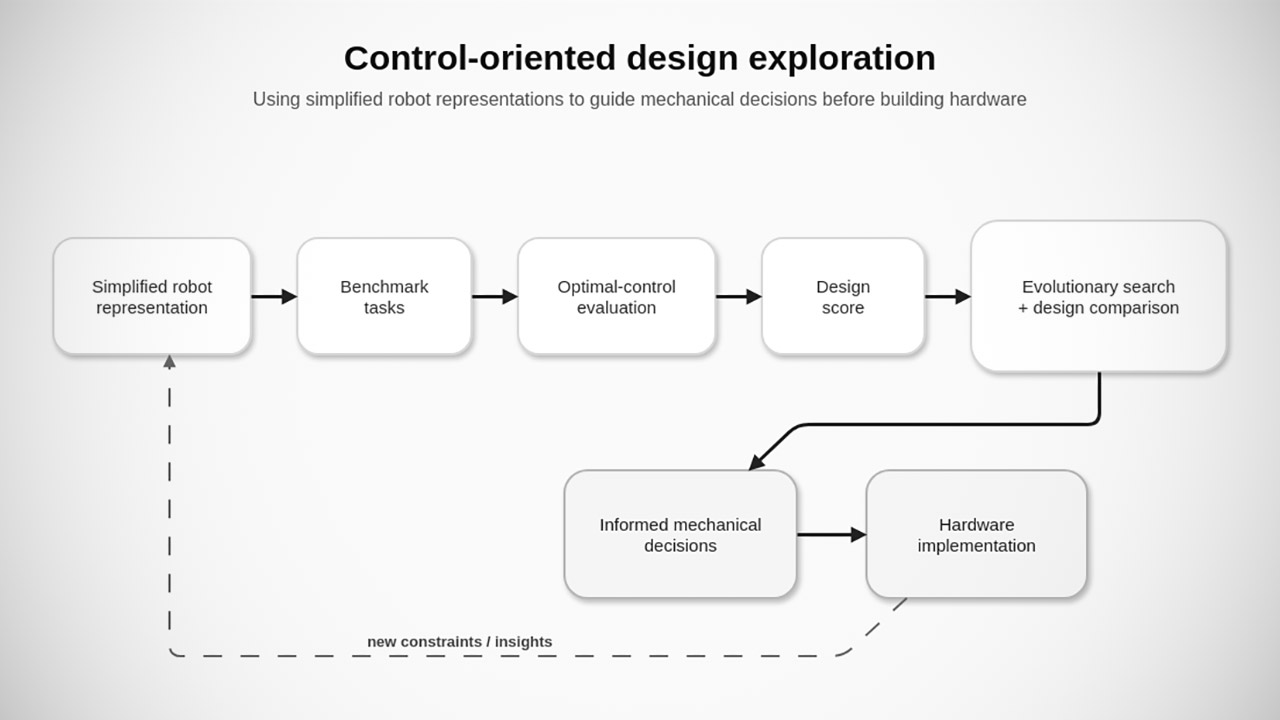
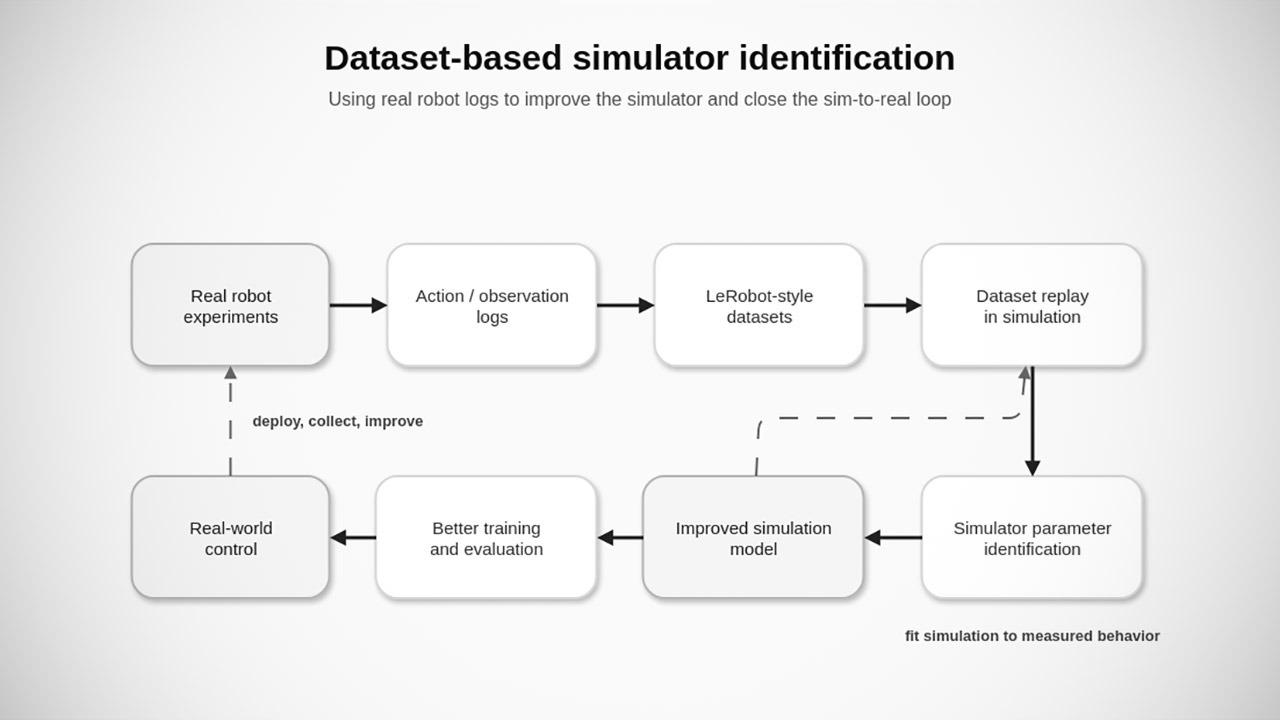
One of the biggest advantages of a 3D printed robot is that your work does not stop once it can stand. If a cover cracks or a linkage feels weak, you can reprint it in PLA+ with a slight design tweak, rather than ordering proprietary spares. The project’s learning tools let you train locomotion policies in simulation using reduced robot models, then deploy those policies on the real legs through the same interface. Logs from real-world tests feed the identification tools, which tune simulator parameters so virtual behavior matches physical behavior more closely over time. Because Hugging Face connects this humanoid to the broader LeRobot library, you can reuse datasets, training code, and control strategies across multiple platforms. The result is a living, modifiable DIY humanoid robot that rewards experimentation and encourages you to keep exploring affordable robotics projects.