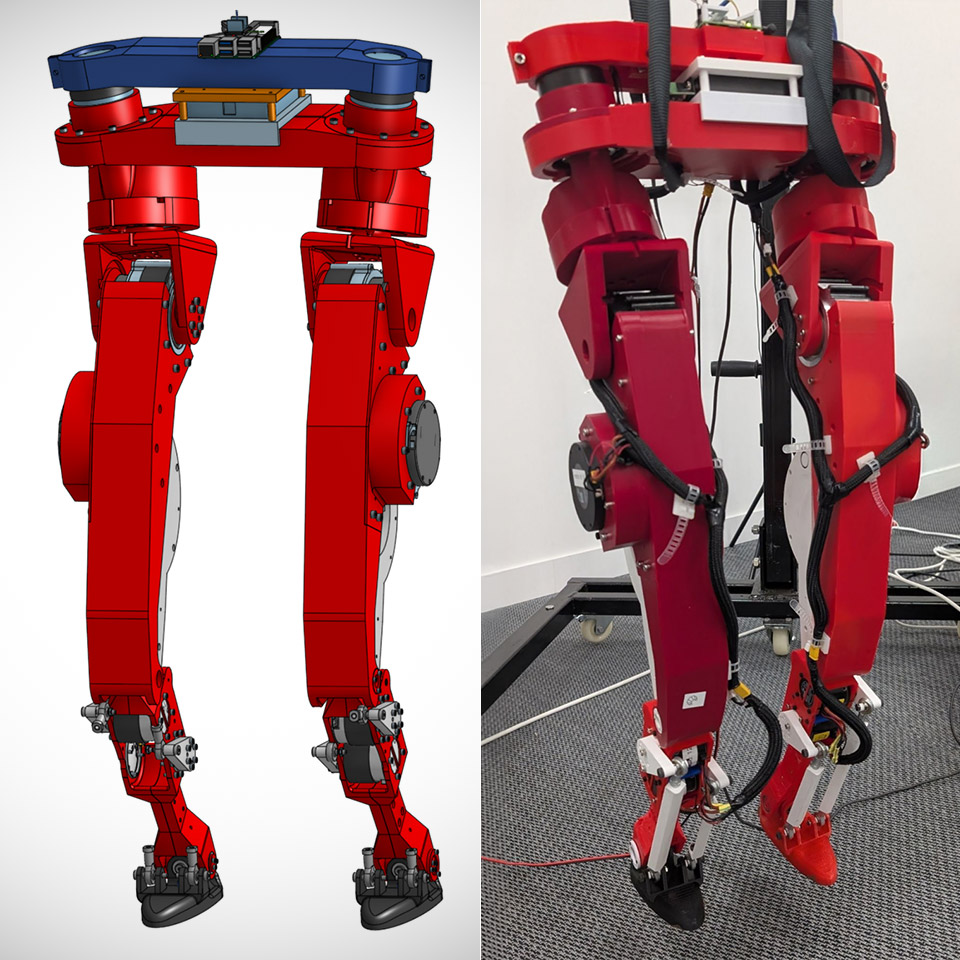
What an Affordable 3D Printed Humanoid Robot Looks Like
A DIY humanoid robot built from open-source plans is a bipedal machine whose core structure is made from 3D printed parts combined with off-the-shelf actuators, sensors, and a small computer, so that makers and researchers can assemble, program, and repair an advanced robot at home without industrial tools or large budgets. Hugging Face’s LeRobot Humanoid platform embodies this idea: it is a bipedal, leg-focused 3D printed robot that uses commodity electronics and detailed online documentation. According to Techeblog, Hugging Face has shared “complete plans for a bipedal robot platform that costs roughly $2,500 in parts and relies mostly on 3D-printed pieces plus common actuators and electronics.” Instead of expensive custom machining, you print around 75 structural files, then add standard actuators, a Raspberry Pi 5, and a few interface boards to create a capable, teachable walking platform.
Gather the Open-Source Files, Parts List, and Tools
To start building your own 3D printed robot based on LeRobot, you first collect the digital and hardware ingredients. The project page on Hugging Face provides STL files for all printable components and a public Onshape CAD model so you can examine or adapt the geometry before printing. You also download the software stack, which includes calibration tools, simulators, and control scripts. On the hardware side, you buy the listed actuators, including the RobStride O0, O2, O3, and O5 units that power the torso and leg joints, along with an IMU sensor, a Raspberry Pi 5, and a CAN FD adaptor. Source reports note that earlier DIY humanoid projects like Berkeley Humanoid Lite can cost around R100,000, while LeRobot’s leg platform comes in much lower, helping position it as an affordable robot kit for education and research.
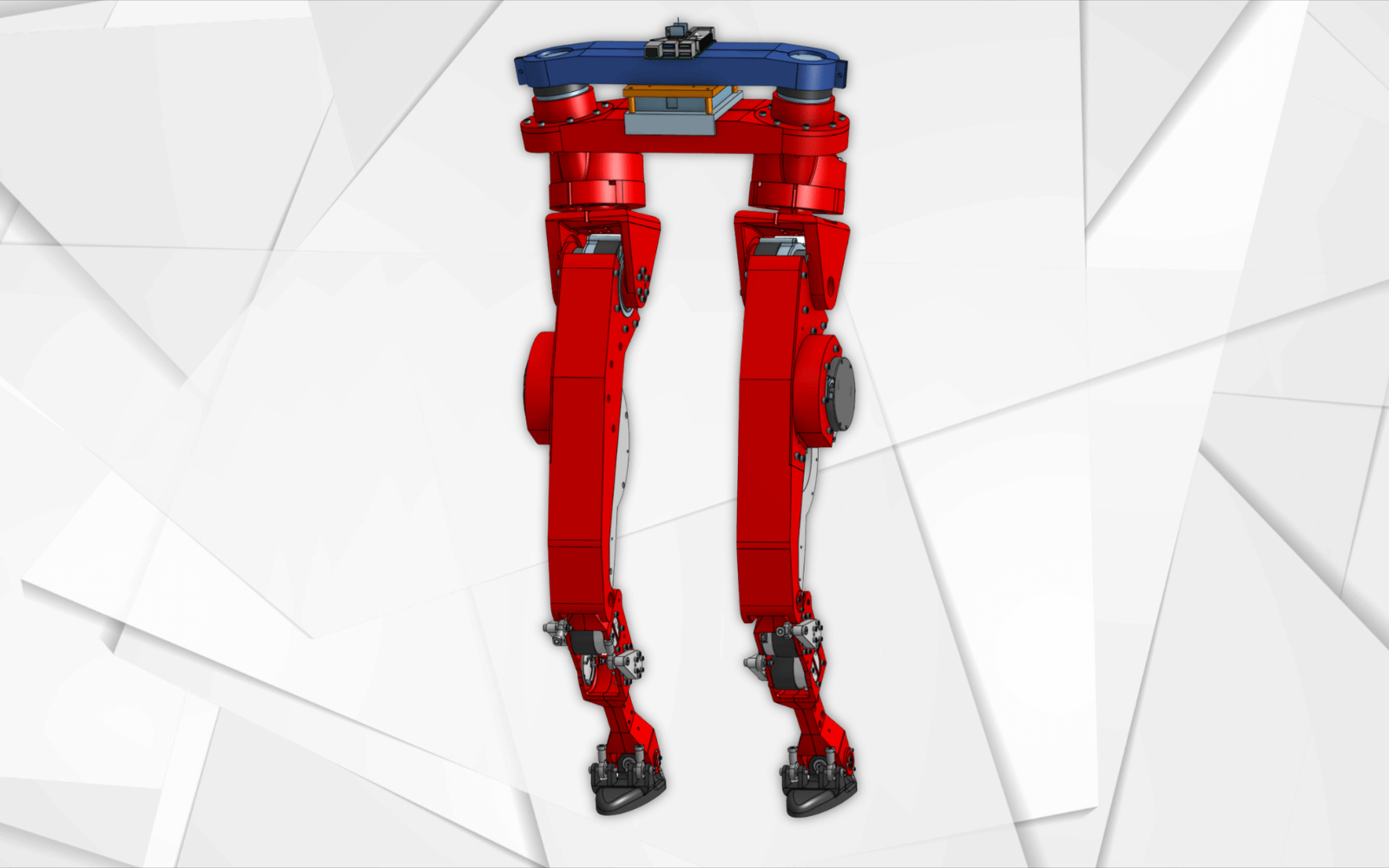
3D Print the Robot’s Body and Structural Parts
Once you have the files, you turn digital designs into physical parts. The LeRobot Humanoid uses between 3.5 and 4 kg of filament for its 3D printed pieces, which form the torso shell, hips, thighs, knees, shins, ankles, and feet. Printing in PLA+ keeps experiments affordable, because you can reprint broken links or covers without changing your tooling. The modular design means you print individual sections and test-fit them with their corresponding actuators, rather than handling one complex frame. A public CAD model lets you adjust wall thickness, cable routing, or mounting points before committing to longer prints. This modular, reprintable structure is central to open source robotics: instead of being locked into a sealed commercial chassis, you can iterate on parts, share improvements, and keep the DIY humanoid robot evolving alongside your needs and experiments.
Wire the Electronics and Bring the Robot to Life Safely
Before you bolt everything together, you configure and test the electronics on the bench. Following the LeRobot documentation, builders first connect each motor to the Raspberry Pi 5 over the CAN bus, using the twin channel CAN FD adaptor and pre-written scripts. This staged approach lets you confirm power delivery, address each actuator, and ensure nothing moves unexpectedly. The runtime software includes calibration procedures and a unified interface that behaves the same in simulation and on the physical robot, which reduces the risk of wiring mistakes or unstable behaviors. Only after each actuator passes its checks do you mount it into its 3D printed housing and close up the assembly. This careful workflow makes open source robotics less intimidating: you can debug issues with a single motor instead of troubleshooting an entire humanoid stack at once.
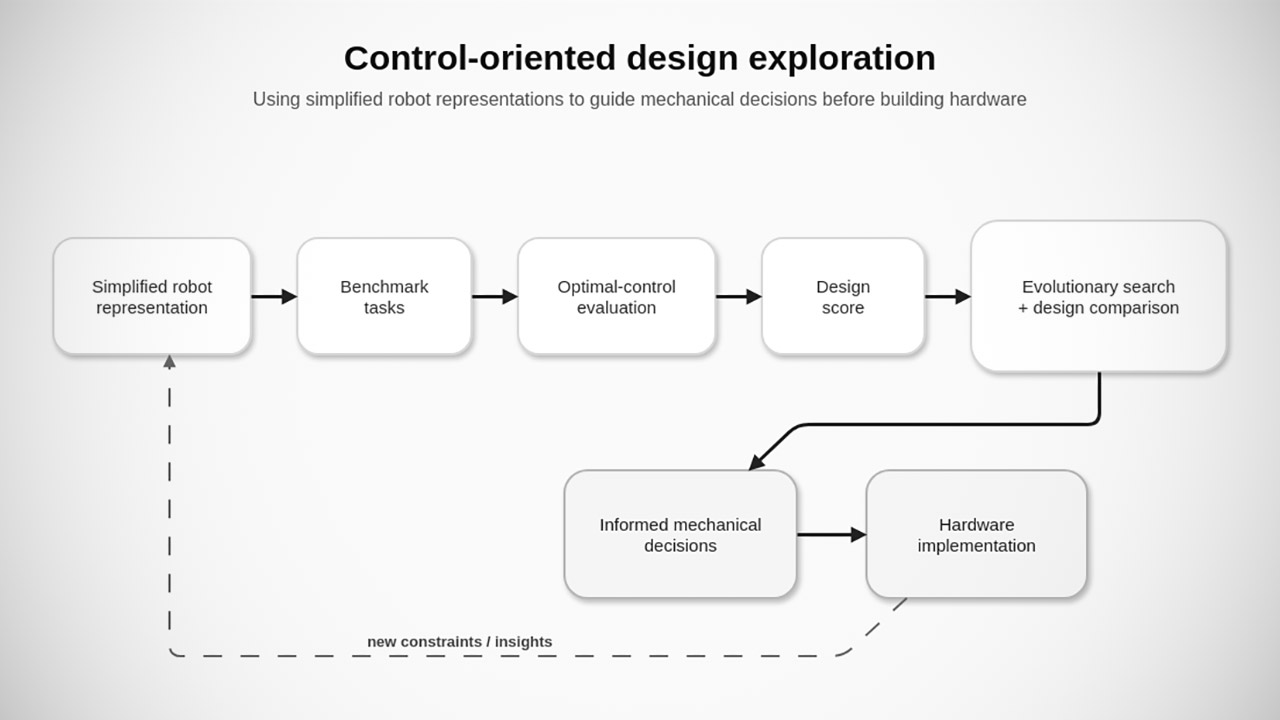
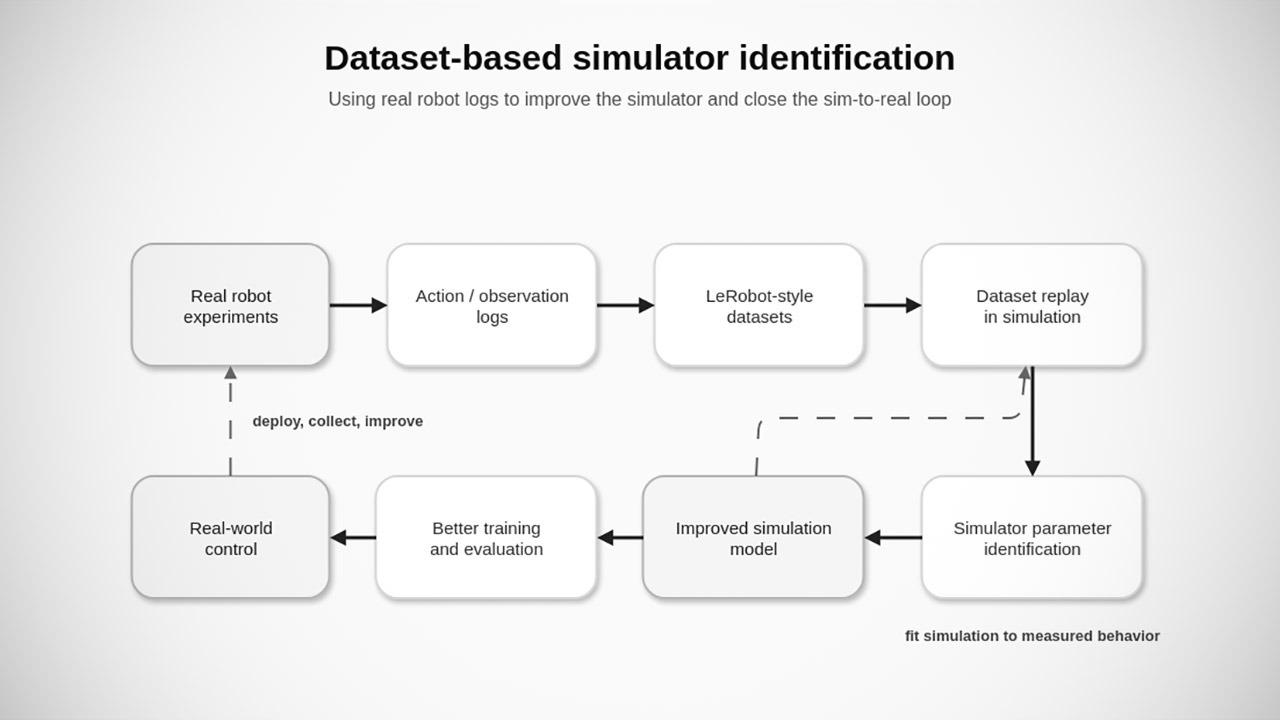
Teach Your Humanoid Robot to Stand, Walk, and Learn
With the hardware assembled, the focus shifts to control, balance, and learning. Hugging Face’s package includes simulation environments and identification tools that align the virtual robot model with real-world behavior. You can prototype locomotion policies in the so-called legged zoo resource, train them in simulation, and then deploy them onto the actual DIY humanoid robot. Logs from real tests help refine simulator parameters so virtual trials match physical dynamics more closely. Early example policies already keep the LeRobot platform stable in basic standing and stepping tasks. Because everything connects to the wider LeRobot library, researchers who use other robots can reuse data and code across platforms. This shared, open stack turns a one-off affordable robot kit into part of a larger open source robotics ecosystem that encourages experimentation, modification, and community-driven upgrades such as adding an upper body.