What an Affordable 3D Printed Humanoid Robot Looks Like
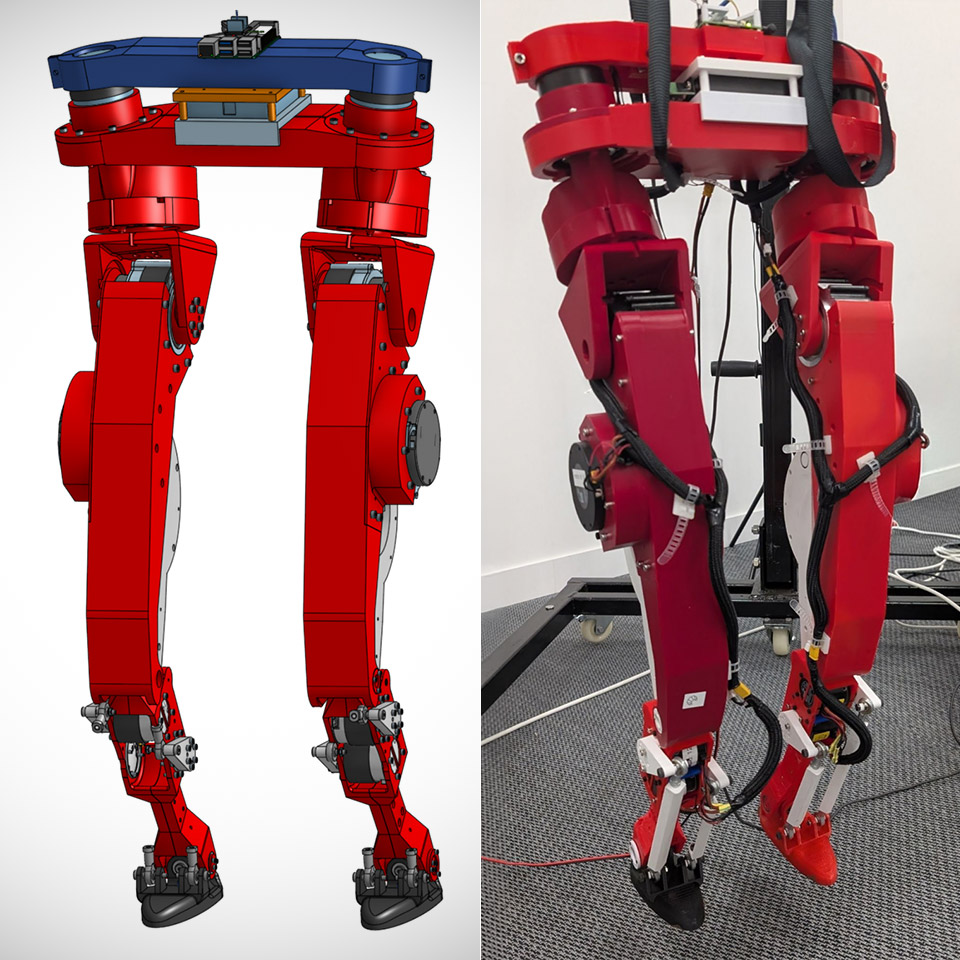
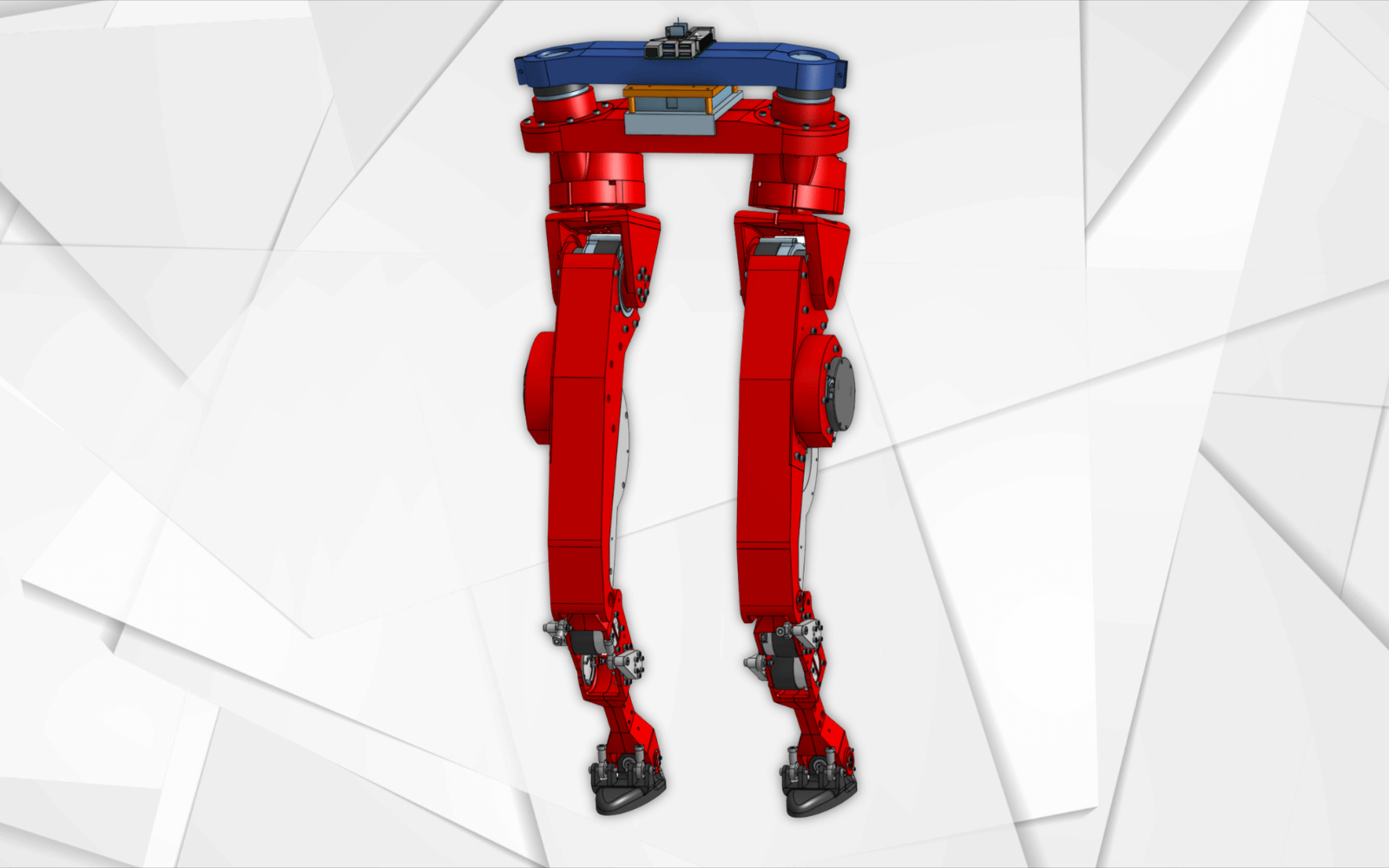
A 3D printed humanoid robot is a bipedal machine whose main structural parts are produced on desktop 3D printers and combined with standard motors, sensors, and open-source control software to create a walking, balance‑capable platform that individuals can build, repair, and modify at home or in small labs at relatively low cost. Hugging Face’s LeRobot Humanoid is a clear example: an open humanoid platform with complete open source robotics plans, including CAD models, printable files, and control code. According to Hugging Face, the bipedal platform costs roughly USD 2,500 (approx. RM11,500) in parts and uses mostly 3D‑printed pieces plus common actuators and electronics. This moves bipedal robots out of exclusive company labs and into makerspaces, classrooms, and garages, where a DIY bipedal robot becomes a realistic project rather than a distant dream.
Planning Your DIY Bipedal Robot Build
Before printing anything, study the open source robotics plans. The LeRobot Humanoid release includes around 75 printable files that form the torso and both legs, broken into hip mechanisms, thighs, knees, shins, ankles, and feet. A public Onshape CAD model helps you inspect clearances, wall thicknesses, and mounting points and adapt them if needed. At the same time, review the complete bill of materials: you will need twelve RobStride actuators, an IMU sensor, a Raspberry Pi 5, and a twin‑channel CAN FD adaptor, plus power and wiring. Allocate time as well as budget; builders report that printing alone can take many days on a consumer machine. Decide early whether you are building a pure lower‑body walker, like the robotic legs project, or a torso‑plus‑legs platform focused on balance experiments and robot learning.
3D Printing Robotics Parts and Assembling the Frame
Once your plan is clear, move into 3D printing robotics components. Start with structural pieces that define alignment, such as hip blocks and shin shells, so you can test fit early. PLA+ filament is widely used in the LeRobot design, and broken links or covers can be reprinted when they wear out, which is ideal for an affordable robot building workflow. Print at moderate layer heights for strength, and avoid hollow parts in load‑bearing joints. After printing, dry‑fit sections without electronics, checking that joint axes line up and that fasteners seat correctly. The design’s modular sections make it easy to replace individual hips, knees, or ankle parts later without reprinting the whole robot. When you are confident in the mechanical fit, you can start adding actuators and route cables, keeping CAN and power runs neat to reduce future troubleshooting.
Electronics, Software, and First Steps with ROS
With the frame ready, mount the twelve RobStride actuators in their labeled positions: O0 units near the torso, O2 units for hip rotation, O3 units on the thighs, and O5 units on the shins. Builders are advised to first connect each motor to the Raspberry Pi 5 over the CAN bus using the provided scripts, then power up and run tests before the robot is fully assembled. This staged approach helps avoid surprises where a misconfigured leg “lurches to life.” The open-source package includes calibration, control tools, and training environments, and it is designed to cooperate with frameworks like ROS, which handle messaging, sensor fusion, and higher‑level behaviors. Start by teaching the robot to stand using the supplied examples, then experiment with small posture adjustments, center‑of‑mass shifts, and simple walking gaits.
Why Open Hardware Makes Humanoid Robots Achievable
Open-source hardware has done for humanoid robots what the personal computer did for computing: it moved serious experimentation from big institutions to smaller teams and individuals. In the past, bipedal research platforms cost hundreds of thousands of dollars and demanded custom electronics and machined parts. Today, affordable microcontrollers, commodity computing boards like Raspberry Pi, and 3D printing have changed that. According to Robotics and Automation News, open hardware platforms have “dramatically lowered the barriers to robotics development,” letting students, startups, and hobbyists build sophisticated robots in garages and dorm rooms. Downloadable projects such as LeRobot Humanoid or Berkeley Humanoid Lite show how shared CAD, parts lists, and documentation can replace closed corporate designs. Combined with ROS and other open tools, they give you not only a 3D printed humanoid robot, but also a community to learn, modify, and improve with.