What This DIY Humanoid Robot Project Is
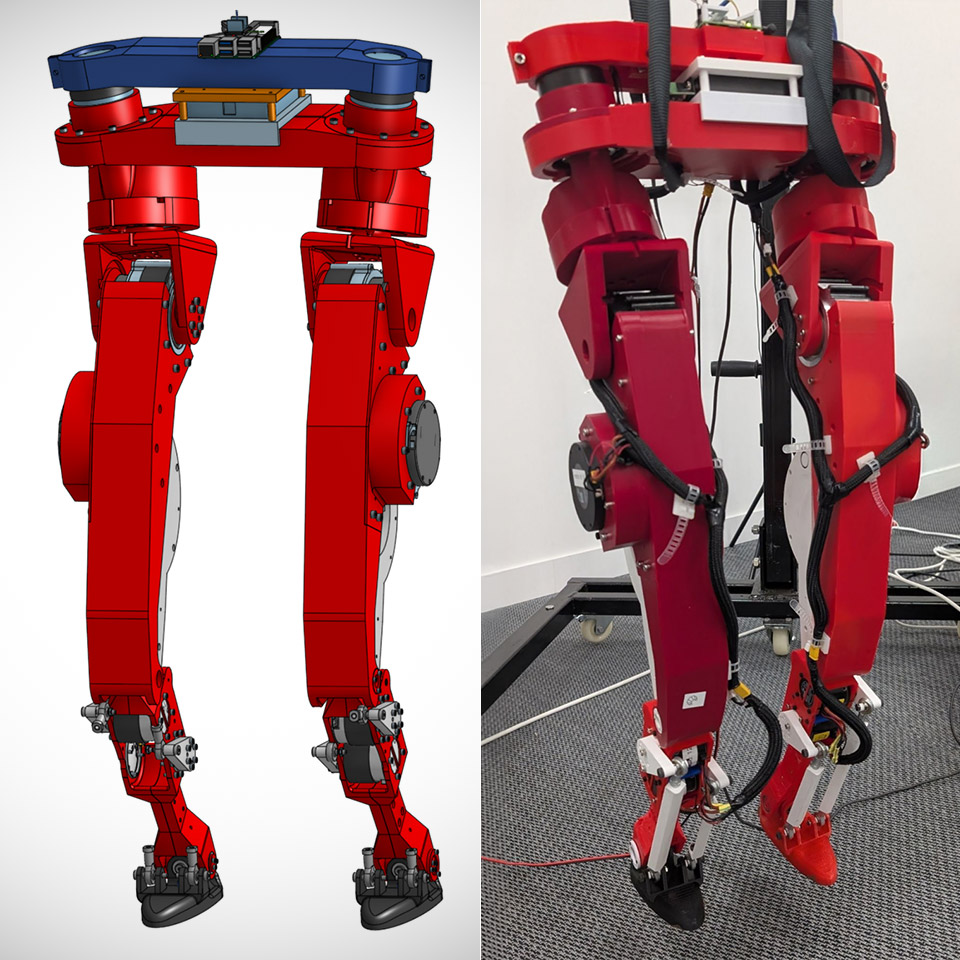
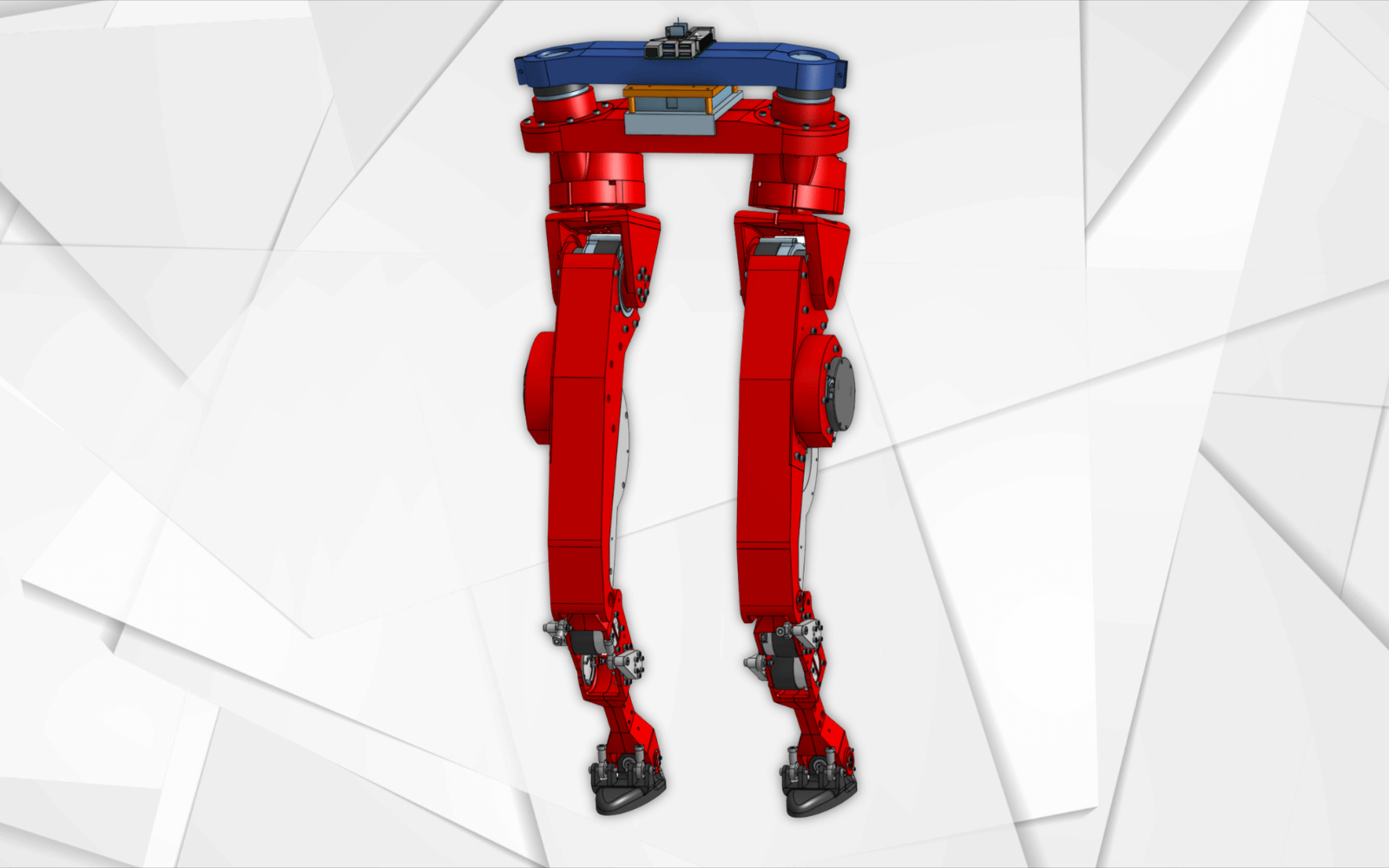
A DIY humanoid robot project based on Hugging Face’s LeRobot Humanoid is an open-source, 3D printed robot platform that uses widely available parts so hobbyists can assemble affordable, bipedal robotic legs capable of real-world learning experiments at home or in the lab. Hugging Face has released complete open source robot plans for a bipedal robot build that costs roughly USD 2,500 (approx. RM11,500) in parts and is made mostly from 3D printed pieces plus common actuators and electronics. According to TechEBlog, “builders start with 75 printable files that form the torso along with left and right legs,” organized into modular hips, thighs, knees, shins, ankles, and feet. This project shifts affordable robotics projects away from expensive, corporate-only hardware and into the hands of students, makers, and researchers who want a capable 3D printed robot they can modify and teach from the ground up.
Planning Your Bipedal Robot Build and Printing the Parts
Before you print anything, study the public Onshape CAD model of the LeRobot Humanoid so you understand how each joint and link fits together in the final DIY humanoid robot. The design breaks into clear sections: hip mechanisms, upper legs, knees, lower legs, ankles, and feet, plus a minimal torso to hold electronics. You download 75 STL files, then print them in strong PLA+ filament; the whole 3D printed robot consumes between 3.5 and 4 kg of filament, which keeps replacement and experiment costs low if parts wear out. Many makers can handle this on a consumer-grade printer, as most parts are sized for typical build volumes. Label printed parts as they come off the bed so assembly later is straightforward, and keep a simple log of print settings that worked best, especially for high-stress joints like knees and ankles.
Actuators, Electronics, and Safe First Power-Up
The LeRobot Humanoid platform relies on common components that hobbyists can source from standard suppliers, helping keep it one of the more affordable robotics projects in the bipedal category. Twelve RobStride actuators drive the robot: two O0 units near the torso, two O2 units for hip rotation, four O3 units for the thighs, and four O5 units for the shins. A Raspberry Pi 5 acts as the main computer, paired with an IMU sensor for balance and a twin-channel CAN FD adaptor to talk to the motors. Hugging Face’s guide recommends that builders first connect each actuator to the computer over the CAN bus and run pre-written scripts to confirm IDs, directions, and current limits before any mechanical assembly. Early tests also confirm that power reaches all devices and that the robot will not lurch into motion when you switch it on for the first time.
Mechanical Assembly and Calibration of Your 3D Printed Robot
Once electronics respond correctly on the bench, you can begin the physical bipedal robot build, working from the hips down so wiring stays tidy. Start by mounting RobStride actuators into the hip frames, then attach thighs, knees, shins, and feet, checking that each joint rotates freely without rubbing printed parts. Route power and CAN cables through the torso and legs with enough slack for motion but not so much that they snag. The supplied runtime package from Hugging Face includes calibration procedures to set joint zero positions and to align the IMU, so the DIY humanoid robot understands which way is up. Because every link and cover is 3D printed, any misaligned or cracked piece can be reprinted in PLA+ from the same files, making this open source robot plan ideal for iterative learning, repairs, and upgrades over time.
Teaching the Robot to Stand and Evolving with the Community
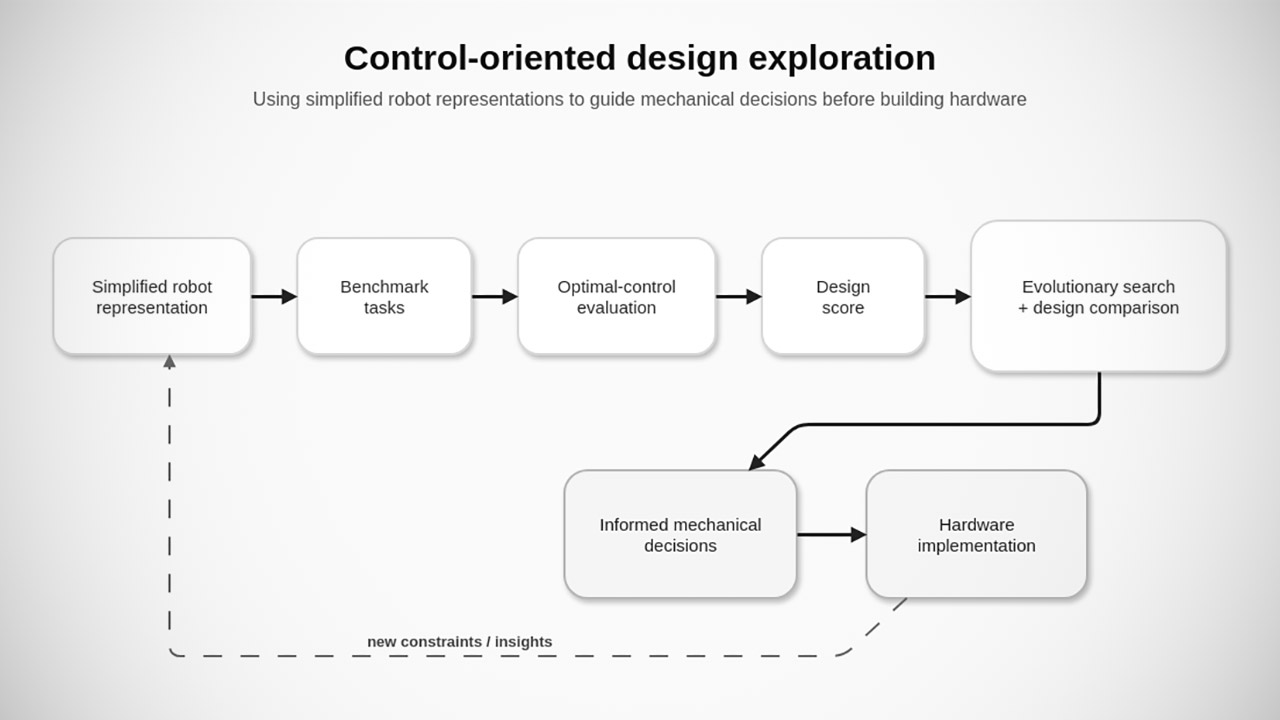
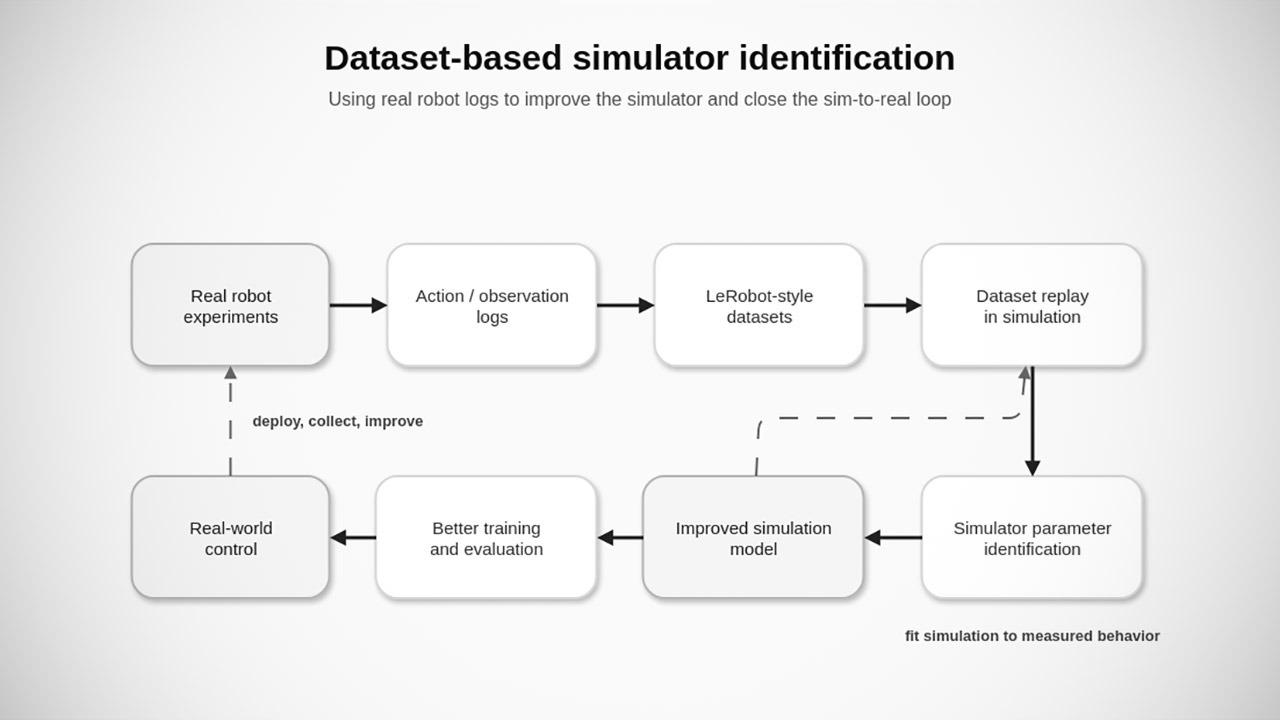
With hardware calibrated, you can move on to foundational skills such as teaching the robot to stand, balance, and shift weight from one leg to the other. Hugging Face provides simulation tools so you can test reduced robot models in virtual benchmarks before deploying code to the real 3D printed robot, then log the results and refine parameters so the simulator better matches reality. The legged zoo resource helps you design and evaluate locomotion policies for stable standing and stepping. There are already early policies that were trained in simulation and then applied to the real robot, where they show stable behavior. Because LeRobot is an open humanoid platform connected to the broader LeRobot library, users can reuse data, models, and code across different affordable robotics projects and contribute their own improvements, such as upper body modules or more advanced behaviors.