From Metal to Code: Redefining the Robotics Bottleneck
Software bottlenecks in robotics software development refer to the growing limits that code quality, architecture, and integration now place on AI robot innovation, often outweighing the constraints of motors, sensors, and processors as physical AI systems move into complex human environments. That shift is the core finding of BlackBerry QNX’s new “Inside the Robot: Architecture Benchmark Report,” based on a survey of 1,000 robotics developers. Nearly one in three respondents (27%) identified software architecture and integration as their biggest performance bottleneck, compared with 16% who pointed to hardware. As robots leave fenced-off factory cells and enter streets, hospitals, and busy shop floors, developers are discovering that more compute power alone does not guarantee safer or smarter behavior. Instead, how software is structured, secured, and certified now determines whether ambitious robotic designs reach deployment or stall in the lab.
Why Hardware No Longer Leads Physical AI Progress
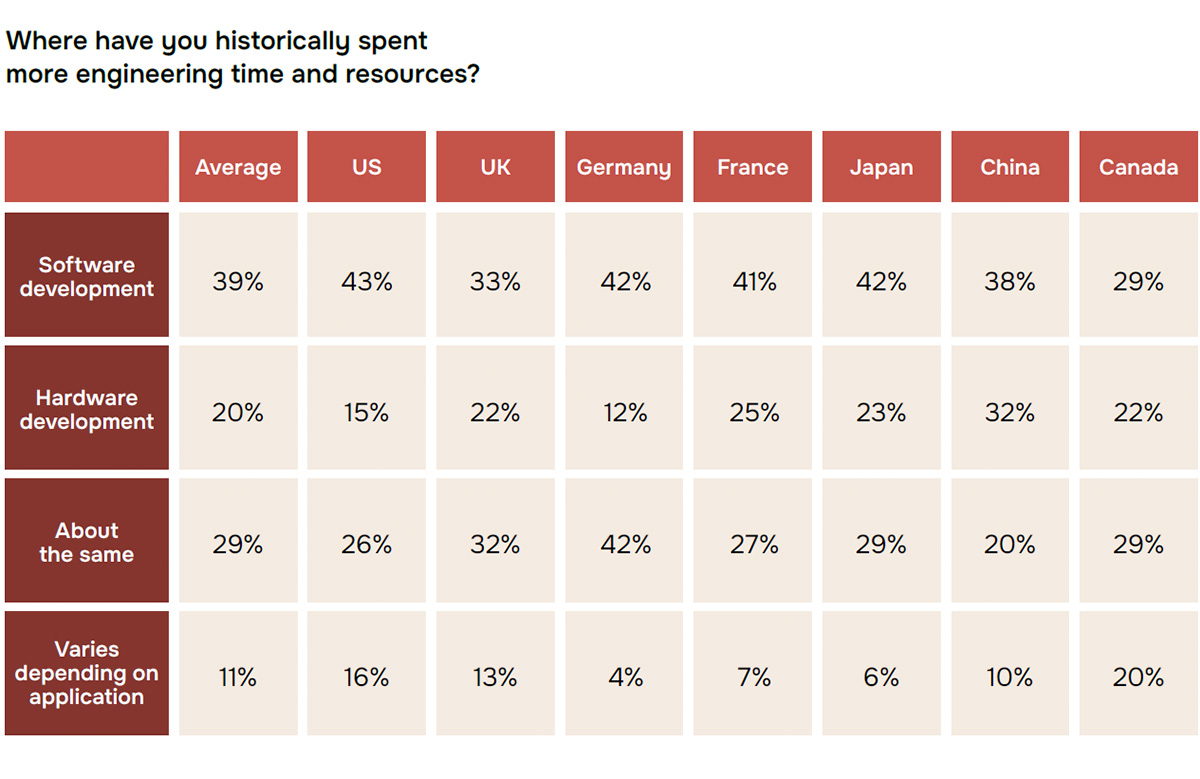
For decades, faster chips and cheaper sensors drove most physical AI systems forward. The QNX research shows that dynamic, human-filled settings have flipped that equation. Developers must coordinate AI perception, motion control, user interaction, and cloud services in one predictable system, which makes architecture and integration the new choke points. According to QNX, 85% of developers expect software to play an even greater role in robotics over the next three to five years, with 51% prioritizing investment in AI-driven decision making and 51% in cybersecurity. Operating systems and real-time control software follow at 37%. This resource shift explains why software development now consumes more engineering capacity than hardware. The challenge is no longer whether a robot can see and move, but whether its software can safely combine high-level AI with strict real-time tasks on shared computing platforms.

Human Environments Raise the Stakes for Safety and Predictability
As robots share space with people, the cost of software failure grows. The survey found that 83% of respondents already deploy systems alongside humans, and another 67% of those not yet doing so expect to within three to five years. In these settings, deterministic, real-time execution is almost universal: 95% of developers say it is important to the systems they build. Yet 91% still run at least some safety-related workloads on general-purpose operating systems that were not created for real-time or safety-critical use. This tension between flexibility and guaranteed behavior is reshaping robotics software development priorities. Teams must prove that physical AI systems will behave predictably under stress, handle mixed-criticality workloads on one platform, and still meet expectations for responsiveness and ease of updates that users associate with consumer technology.

Certification, Security, and the Architecture Squeeze
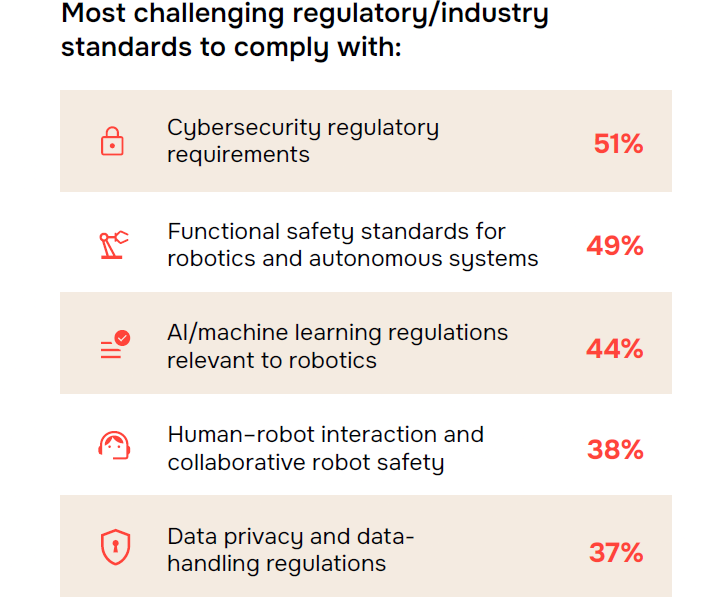
Regulation and cyber risk are turning software architecture from an engineering detail into a strategic concern. Two-thirds of surveyed teams report project delays due to certification processes, which directly affects launch timing and commercial risk. Cybersecurity standards, such as ISO/SAE 21434, and functional safety rules, such as ISO 10218, are among the hardest to satisfy, cited by 51% and 49% of respondents. Many developers say their current operating systems are not ideal for safety-critical work, and 86% of those using general-purpose operating systems are open to changing their OS. As robotics platforms become more interconnected and AI-enabled, every layer—from kernel design and middleware to application code—must support strong isolation, security, and auditability. Without better architectural foundations, more regulation and connectivity will only deepen the software bottleneck in AI robot innovation.
What the Industry Needs to Unlock Next-Generation Robots
The QNX report suggests the problem is not a lack of ambition but a gap in software tooling and foundations. Developers highlight four recurring challenges: integration complexity, certification delays, functional safety risks in human-machine interaction, and ensuring predictable behavior under critical conditions. Addressing these obstacles will demand stronger real-time operating systems, standardised frameworks for mixed-criticality workloads, and development tools that make security and safety analysis part of everyday robotics software development, not a final hurdle. Teams also need reference architectures that show how to combine AI decision-making with deterministic control on shared hardware. As physical AI systems spread into surgery, logistics, and public spaces, the industry’s ability to ship reliable, certifiable software will decide which robotics platforms scale. Hardware may define what robots could be; software now decides which ones will exist.