From metal to code: redefining the robotics bottleneck
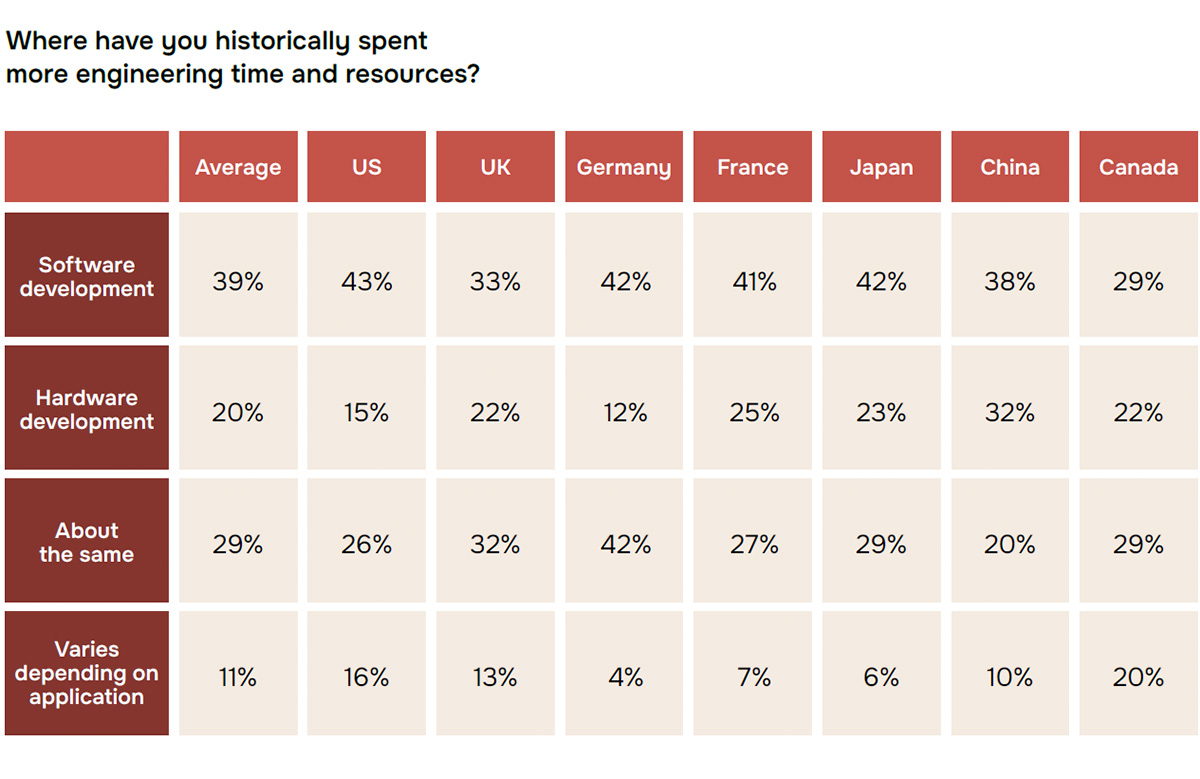
The main bottleneck in modern robotics is no longer mechanical hardware but the increasingly complex software that must control, secure, and certify intelligent machines operating in the real world. As physical AI innovation pushes robots from controlled factory cells into hospitals, city streets, and shop floors, robot performance now depends on dependable, safe, and secure code. A new QNX “Inside the Robot: Architecture Benchmark Report” survey of 1,000 robotics developers shows that software development consumes more resources than hardware and is the main source of delay and risk. This marks a shift in robotics software development: hardware platforms are powerful and affordable enough for advanced autonomy, but teams struggle to design robot software architecture that can manage AI, real-time control, and safety in one system. The hardware is ready; the software stack is still catching up.
Hardware races ahead while software hits architectural limits
QNX’s research highlights a clear imbalance between hardware progress and software readiness. Almost one in three developers, 27%, name software architecture and integration as their biggest performance bottleneck, compared with 16% who point to hardware. That gap signals an AI robotics bottleneck rooted in software design rather than processors, sensors, or actuators. As robots gain more sensors and AI models, developers must combine high-level decision making with low-latency motion control, often across distributed components. Legacy architectures were not designed for such mixed levels of criticality, where safety functions, perception, and cloud connectivity share the same platform. Teams report integration complexity, functional safety risks, and difficulty guaranteeing predictable behavior under load. In effect, software foundations have become strategic infrastructure: without a stable real-time base, new hardware capabilities cannot be fully used, delaying physical AI innovation that the underlying electronics could already support.

Robots in human spaces raise safety and determinism demands
As robots leave cages and enter human environments, the stakes for software failures rise sharply. More than four in five developers, 83%, say their systems already operate alongside people in workplaces or daily settings. Among organizations not yet at that stage, two-thirds expect human-robot deployment within three to five years. This expansion into surgical suites, busy shop floors, and other dynamic spaces pushes expectations for reliability, safety, and predictable behavior. Nearly all respondents, 95%, say deterministic, real-time execution is important for the systems they build, underscoring how timing guarantees and consistency are now central to physical AI innovation. Yet many teams still run control and AI workloads on general-purpose operating systems that were not designed for strict real-time response. That mismatch between deployment risk and platform capability adds pressure to rethink robot software architecture before failures occur in frontline human environments.

Security and certification: the new cost of autonomy
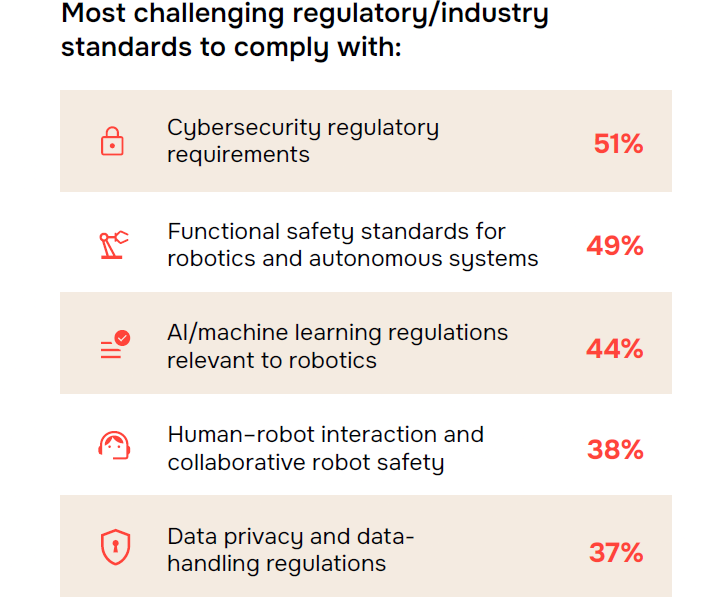
Security and compliance are emerging as major constraints on robotics software development. As robots connect to networks and handle sensitive data, teams must defend against cyberattacks while meeting functional safety and industry standards. QNX’s report notes that 51% of respondents cite cybersecurity standards such as ISO/SAE 21434 as among the most challenging requirements, with 49% pointing to functional safety standards like ISO 10218. Two-thirds of developers, 66%, report project delays driven by certification processes, stretching timelines and increasing commercial risk. At the same time, 91% say they still run at least some safety-critical workloads on general-purpose operating systems, even though they rate safety-certified commercial solutions as a better fit. As a result, 86% of those using general-purpose platforms are open to switching operating systems. Security and certification are no longer add-ons; they shape how teams design and ship physical AI systems.
Building software foundations for the next wave of physical AI
Despite today’s constraints, developers see software as the path forward. According to QNX, 85% of respondents expect software to play an even greater role in robotics over the next three to five years. Teams plan their biggest investments in AI-driven decision making and cybersecurity, both at 51%, followed by operating systems and real-time control software at 37%. The direction is clear: future gains will come from better architectures, not faster chips alone. Stronger software foundations—real-time operating systems, safe middleware, and modular robot software architecture—can reduce integration complexity, shorten certification cycles, and support mixed-criticality workloads on a single platform. If teams can solve these issues, they unlock safer, more reliable, and more autonomous robots. The industry’s AI robotics bottleneck is therefore less a permanent barrier than a software engineering challenge that must be addressed before the full potential of physical AI innovation can be realized.