From Mechanical Limits to Software as the New Bottleneck
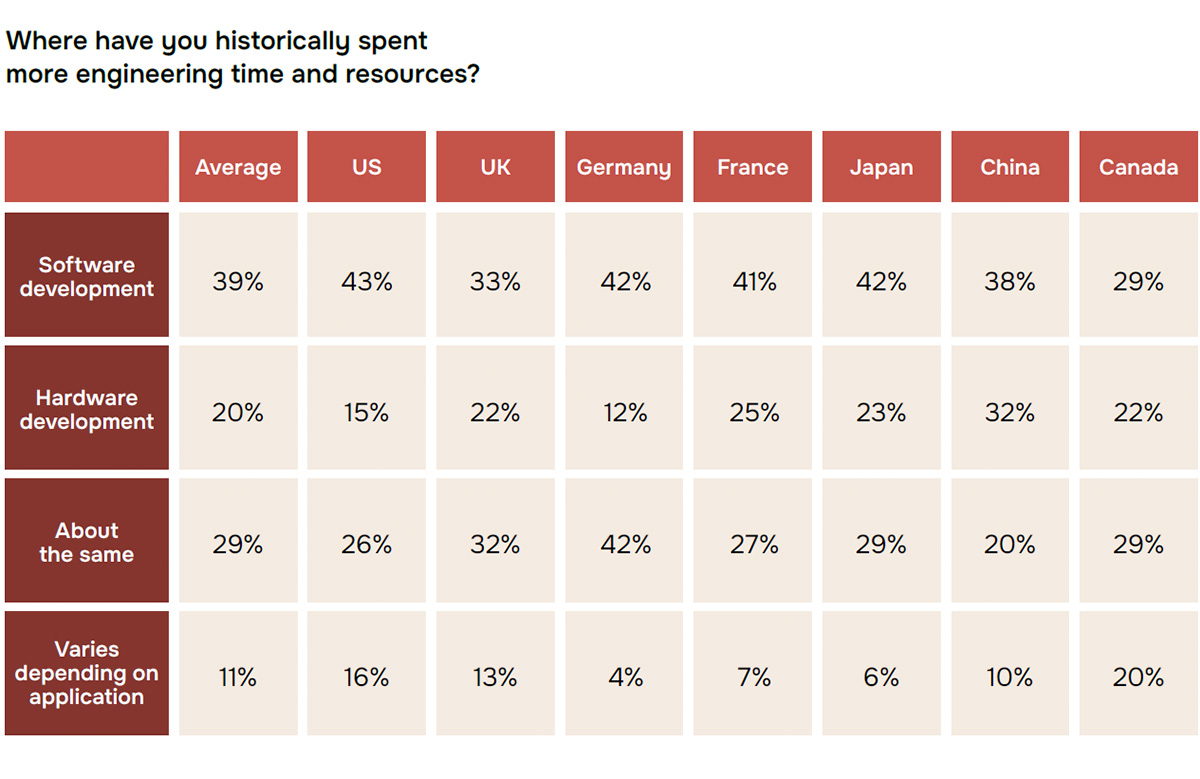
Robotics software challenges describe the growing performance, reliability, security, and scalability problems in code, operating systems, and integration layers that now limit how far physical AI systems and advanced robots can evolve and be deployed in the real world. New research from QNX, based on 1,000 robotics developers, shows this shift clearly: almost one in three respondents (27%) now name software architecture and integration as their biggest performance bottleneck, compared with 16% who point to hardware. That finding signals a turning point, where mechanical and sensor advances are no longer the primary constraint. As robots gain better actuators and perception, their progress is increasingly gated by whether software can coordinate complex behavior, uphold safety, and support long-term upgrades without breaking. In short, the physical AI bottlenecks have moved from metal to code.
Robots Move into Human Spaces, Raising Reliability Demands
As robots leave controlled test cells for hospitals, warehouses, streets, and shops, their operating context becomes far less predictable—and software must compensate. According to QNX, more than four in five robotics teams (83%) say their systems are already deployed alongside humans, and among the rest, two-thirds expect this within three to five years. This shift magnifies robotics innovation constraints: instead of repeating a fixed routine, machines must interpret changing environments, avoid people, and adapt to edge cases. Almost all surveyed developers (95%) now consider deterministic, real-time execution important, yet many still depend on general-purpose operating systems that were not designed for safety-critical workloads. That mismatch leaves gaps in predictability and response time, which show up as performance, safety, and reliability issues. In expanding human environments, failures are no longer theoretical—they threaten business continuity and public trust in physical AI systems.

Security, Certification, and the Weight of Compliance
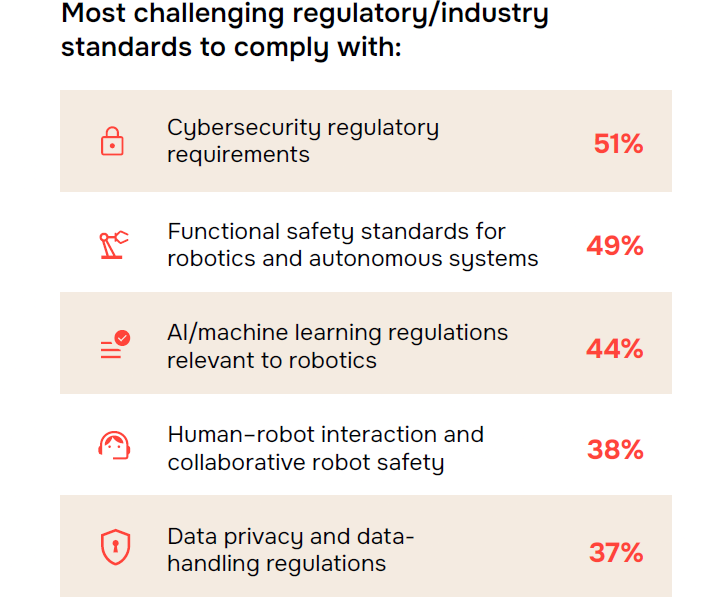
As robots connect to networks and cloud services, robot security scalability becomes a central concern, not an afterthought. The QNX survey highlights that cybersecurity standards such as ISO/SAE 21434 and functional safety rules like ISO 10218 are among the hardest requirements, cited by roughly half of respondents. Two-thirds of developers report project delays tied to certification, demonstrating how security and compliance now impact timelines as much as engineering itself. These pressures add another layer to robotics software challenges: every change in software must be auditable, testable, and safe under worst-case conditions. At the same time, architectures must scale across fleets, updates, and new features without reopening old vulnerabilities. When teams struggle to prove predictable behavior and secure operation, powerful hardware cannot be fully used, turning regulatory and security gaps into practical physical AI bottlenecks across industries.
Why Stronger Software Foundations Are Becoming Strategic
Despite current constraints, developers see a path forward by rebuilding software foundations. The QNX research found that 85% of respondents expect software to play an even greater role in robotics in the next three to five years, with teams planning major investment in AI-driven decision making and cybersecurity, followed by operating systems and real-time control software. That shift reflects a growing consensus: future gains will come from architectures that are predictable, secure, and designed for mixed criticality—from low-risk perception tasks to life-critical control loops. Many teams still rely heavily on general-purpose operating systems, yet 86% of those users say they are open to changing their OS, signaling a readiness to adopt safer, more deterministic platforms. By prioritizing secure middleware, real-time kernels, and clearer separation of workloads, developers aim to remove key robotics innovation constraints and enable more capable, trustworthy physical AI.