When Robotics Innovation Hits a Software Wall
Robotics software challenges describe the growing mismatch between increasingly capable hardware and the software architectures, security models, and real-time systems needed to deploy safe, autonomous robots in uncontrolled physical environments at scale. That gap is now showing up clearly in data. In QNX’s new “Inside the Robot: Architecture Benchmark Report,” almost one in three developers (27%) name software architecture and integration as their biggest performance bottleneck, compared with 16% who point to hardware. The study, based on 1,000 robotics developers, suggests that the main robotics innovation bottleneck has moved from sensors and actuators to code and system design. As robots shift from fenced-off cells to hospitals, streets, and shop floors, developers say progress depends on building software foundations that are predictable, secure, and able to coordinate tasks with different criticality levels in real time.
Physical AI Raises the Stakes for Performance and Predictability
Physical AI development—robots that can perceive, reason, and act in the real world—is now central to product roadmaps. QNX reports that 89% of respondents say AI-enabled robots will be critical to their organisation’s strategy within three to five years. At the same time, more than four in five robotics systems (83%) are already operating alongside humans, from surgical settings to busy factory floors. That exposure to unconstrained environments makes performance and predictability non‑negotiable. An overwhelming 95% of developers say deterministic, real-time execution is important to the systems they build. Yet most teams still depend on general‑purpose operating systems that were not designed for safety‑critical workloads. This tension between flexible, familiar tools and the need for guaranteed behaviour is shaping architecture decisions, as teams try to align advanced AI models with real-time control loops that cannot miss deadlines without risking safety.

Security, Certification, and the Cost of Slow Software Foundations
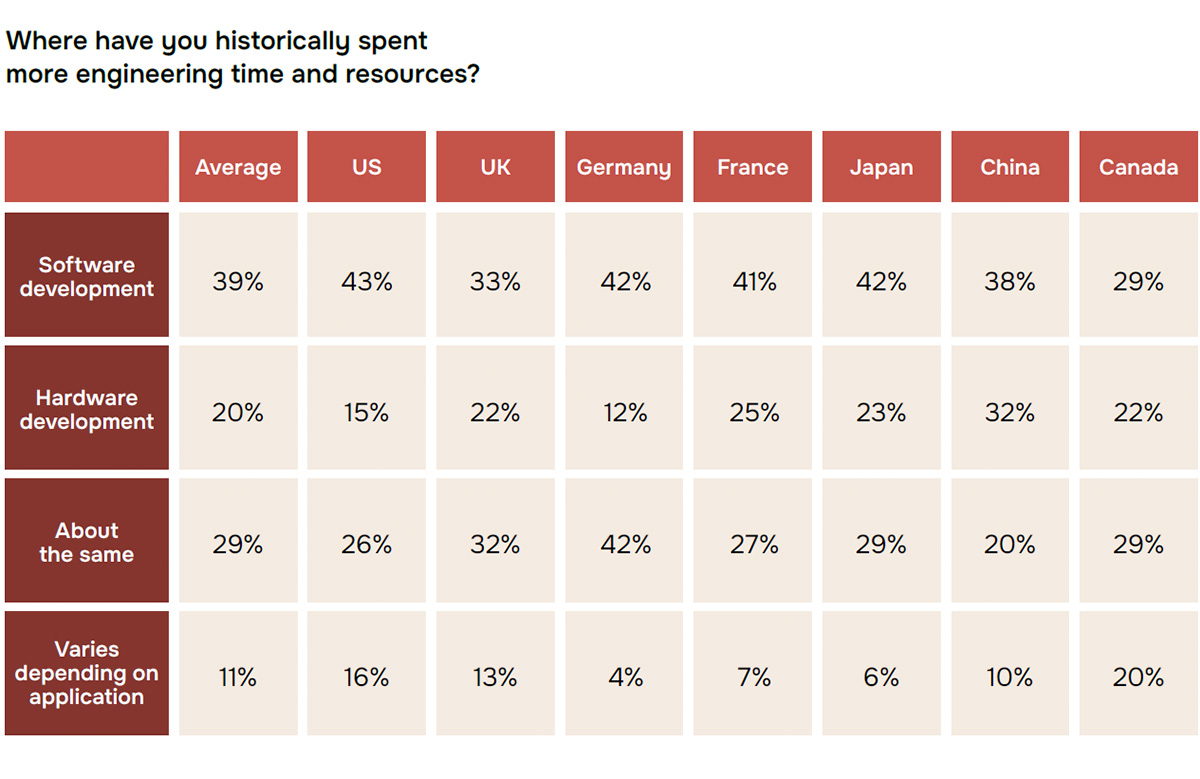
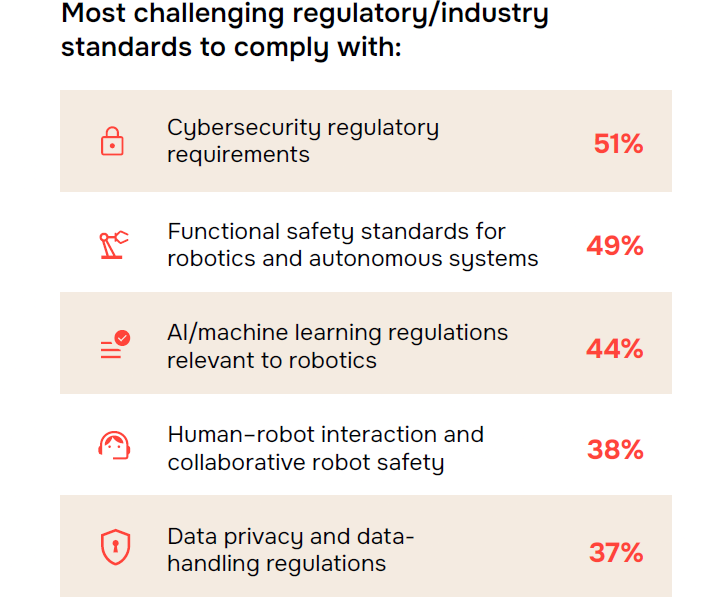
As robots leave controlled spaces, robot security scalability becomes a central concern. Developers must show that connected machines can withstand cyberattacks while meeting strict functional safety requirements. Cybersecurity standards such as ISO/SAE 21434 and functional safety rules like ISO 10218 are among the hardest requirements to meet, each cited by about half of surveyed teams. According to QNX, 66% of respondents report project delays due to certification processes. These delays push back launches and increase engineering load, even as more robots are expected to operate beside people. The research also finds that software development now consumes more developer resources than hardware, underlining how much effort is going into security‑aware code, operating systems, and real-time control logic. The industry message is that without credible, certifiable software foundations, scaling physical AI beyond pilots will remain slow and expensive.
Designing for Scale Without Sacrificing Safety
The next wave of robotics innovation depends on reconciling scale with safety. Developers must grow fleets of autonomous machines, update them over the air, and coordinate swarms without weakening security or deterministic control. QNX’s survey shows teams expect their biggest investments over the next three to five years to be AI-driven decision making and cybersecurity, both at 51%, followed by operating systems and real-time control software at 37%. Those priorities show how software foundations are becoming strategic assets in robotics design. Engineering leaders talk about moving away from ad‑hoc stacks toward modular, safety-certified operating systems that can host both high-criticality control and less critical AI workloads. If integration complexity, certification delays, and functional safety risks can be addressed through more predictable architectures, developers expect a faster path from prototype to large-scale, safe deployments of physical AI systems.