What a 3D‑Printed Humanoid Robot Means Today
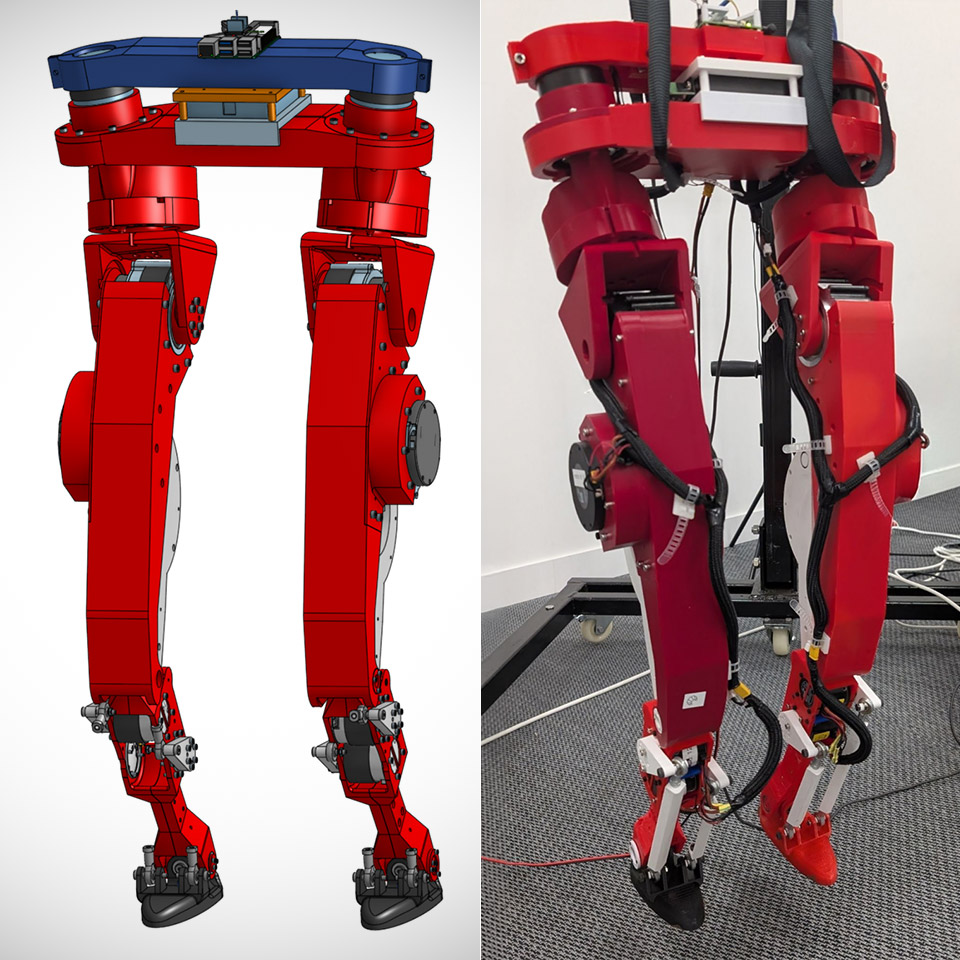
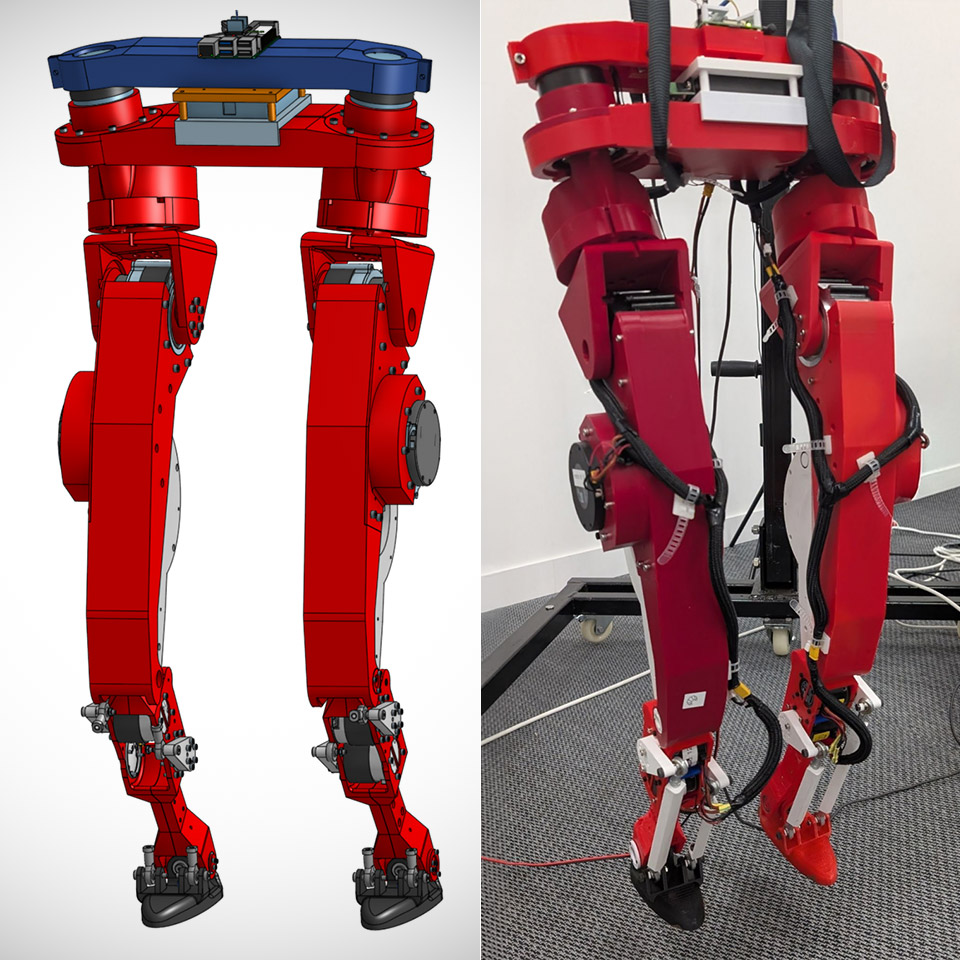
A 3D printed humanoid robot is a human-shaped machine built from mostly printed plastic parts, commodity motors, and off‑the‑shelf electronics, assembled by non‑experts using openly shared digital designs and software. Hugging Face’s new LeRobot platform turns that definition into something you can put on your workbench. The company has released complete plans for a bipedal robot that costs roughly $2,500 (approx. RM11,500) in parts and relies mostly on 3D‑printed pieces combined with common actuators and electronics. Builders download 75 printable files that form the torso and both legs, divided into modular sections such as hips, thighs, knees, shins, ankles, and feet. A public Onshape CAD model lets anyone inspect or adapt the geometry before printing, helping both hobbyists and researchers understand each joint, refine clearances, or remix the structure into their own DIY humanoid robot experiments.
Inside Hugging Face’s $2,500 Home‑Build Humanoid
Under the printed shell, Hugging Face’s LeRobot is a carefully structured open source robotics hardware project. Twelve RobStride actuators drive the robot’s motion: two O0 units near the torso, two O2 units for hip rotation, four O3 units for the thighs, and four O5 units for the shins. An IMU sensor tracks orientation and balance, while a Raspberry Pi 5 acts as the main computer, connected to the actuators through a twin‑channel CAN FD adapter. According to TechEBlog, “builders start by connecting each motor to the main computer over the CAN bus using pre‑written scripts before physical assembly,” which helps confirm wiring and power delivery before the robot ever moves. When something breaks, a damaged link or cover can be re‑printed in PLA+ filament, turning maintenance into another 3D printing job instead of a hunt for custom parts.
How Open Hardware Democratizes Affordable Robot Building
Open-source robotics hardware has shifted robot building from exclusive labs to garages and classrooms. Platforms like Arduino and Raspberry Pi showed that capable electronics could be cheap, hackable, and well documented, and the same logic now applies to full robot bodies. Affordable microcontrollers, low‑cost sensors, commodity computing hardware, 3D printing, and the Robot Operating System (ROS) together make affordable robot building realistic for students and small teams. Instead of designing every circuit and gearbox from scratch, builders remix a robot reference design, print the parts, and focus on control, perception, or AI. Open mobile platforms such as TurtleBot proved this model for wheeled robots; humanoids like LeRobot extend it into legged motion and balance. Shared CAD, wiring diagrams, and community forums mean one person’s weekend fix can guide hundreds of future DIY humanoid robot projects.
From LeRobot to Isaac GR00T: Reference Designs Speed Progress
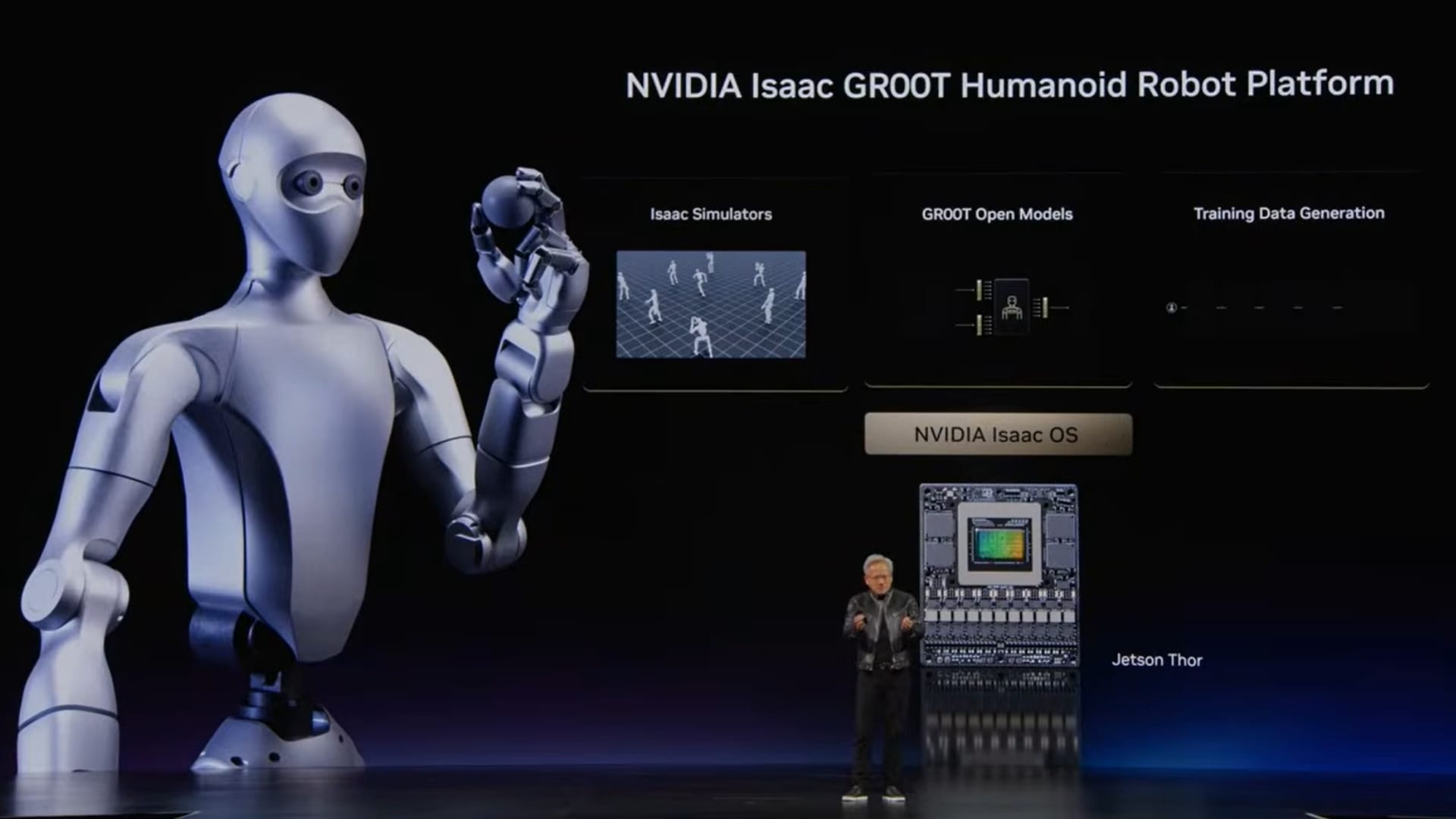
Hugging Face’s design is one end of a growing spectrum of open humanoid platforms. On the high‑end research side, Unitree’s H2 Plus humanoid robot reference design, built on NVIDIA Isaac GR00T, packages a full‑scale body, tactile five‑finger hands, and Jetson Thor onboard compute into a single system. This kind of robot reference design accelerates work on “physical AI” by unifying hardware, sensing, training workflows, and deployment software, rather than forcing teams to assemble everything piece by piece. LeRobot plays a similar role for makers: it offers a complete biped outline—mechanics, electronics, and software stack—that can be adapted or extended. Builders can plug into ROS and other open frameworks to reuse navigation, control, and simulation tools. Taken together, these open designs shorten the journey from first power‑up to meaningful humanoid behaviors.

Getting Started with Your Own DIY Humanoid Robot
For anyone tempted to build a 3D printed humanoid robot, the path is clearer than it has ever been. You begin by reviewing the CAD model to understand each subassembly, then print parts in batches while sourcing actuators, sensors, and a suitable single‑board computer such as a Raspberry Pi 5. Following the reference wiring diagrams, you bring up each actuator on the CAN bus using the provided scripts, verifying communication and power before committing to full assembly. Once the legs and torso are built, you can use open‑source software frameworks like ROS to handle low‑level control, sensor fusion from the IMU, and early balance experiments. Because the hardware is modular and well documented, you can upgrade feet, redesign hip joints, or bolt on arms later, evolving a basic affordable robot building project into a long‑term humanoid research platform.