What NVIDIA Isaac GR00T Is and Why It Matters
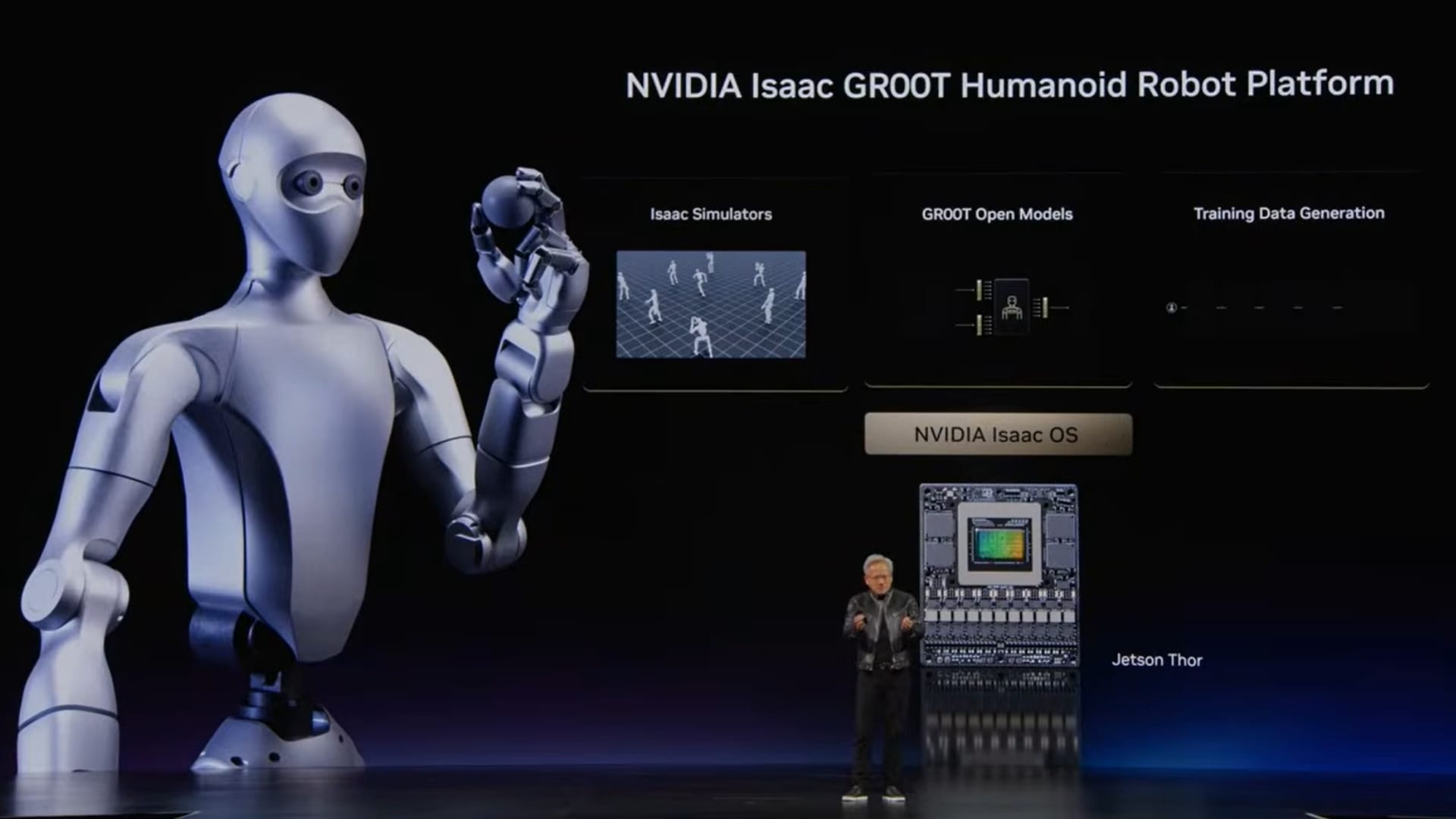
NVIDIA Isaac GR00T is an open humanoid robot design that combines a full-scale robot body, onboard AI compute, and a shared software stack so research teams can focus on developing real-world robot skills instead of wrestling with fragmented hardware and tools. Launched at NVIDIA’s GTC event in Taipei, the Isaac GR00T Reference Humanoid Robot brings together a Unitree H2 or H2 Plus humanoid chassis, Sharpa Wave tactile five‑finger hands, and a Jetson AGX Thor T5000 computing module under one unified robotics research platform. This reference design robotics package targets academic labs and frontier robotics groups that have struggled with separate suppliers for mechanics, sensors, compute, and simulation. By treating humanoid hardware and software as a single open starting point, NVIDIA is trying to make humanoid research feel more like software development on a standard dev kit than a multi‑year integration project.

Inside the Open Humanoid Robot Design: Body, Sensing, and Compute
Isaac GR00T’s physical platform starts with the Unitree H2/H2 Plus humanoid body, standing nearly six feet tall, weighing about 150 pounds, and offering 31 degrees of freedom for human‑scale motion experiments. Dual Sharpa Wave tactile hands expand the system to as many as 75 degrees of freedom, giving researchers fine control for dexterous manipulation that simple grippers cannot match. Multi‑view sensing includes a head‑mounted stereo camera with a 140‑degree horizontal and 102‑degree vertical field of view, wrist cameras for close‑up work, and an inertia measurement unit to track motion and balance. For physical AI tasks that involve carrying and pushing, the robot supports arm torque up to 120 Newton‑meters, leg torque up to 360 Newton‑meters, and arm payloads rated at 7 kilograms with peaks up to 15 kilograms. Onboard, the Jetson AGX Thor T5000 brings a Blackwell GPU with 2,070 FP4 teraflops of AI performance, a 14‑core Arm CPU, and 128GB of unified memory.
From Fragmented Pipelines to an Integrated Robotics Research Platform
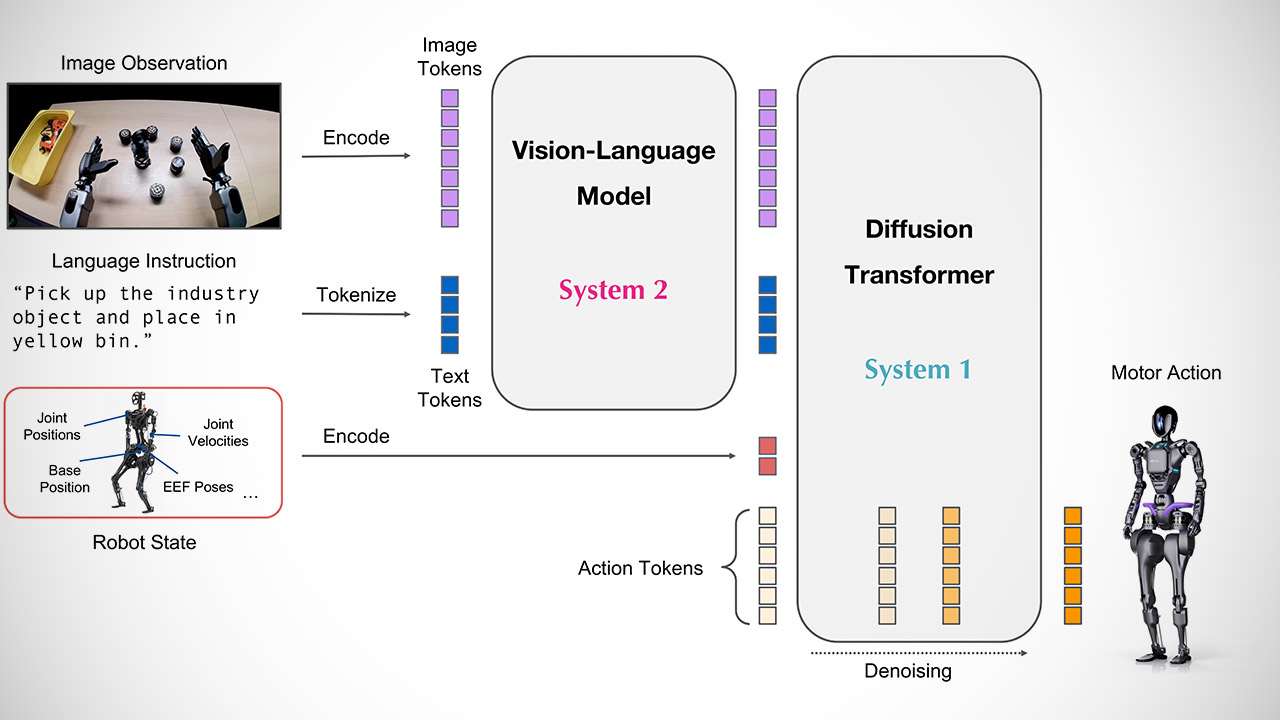
Humanoid robotics development has been split across hardware integration, simulation, data collection, training, evaluation, and deployment, often forcing labs to act as systems integrators before they can even test a task. NVIDIA’s open humanoid robot design aims to compress this pipeline into a single robotics research platform that is ready for skill development from day one. The Isaac GR00T stack includes open models for perception, planning, and control, capable of handling spoken commands, camera input, and robot pose in one workflow. According to NVIDIA, “The NVIDIA Isaac GR00T Reference Humanoid Robot gives researchers a single, open platform to make breakthrough discoveries toward general-purpose physical intelligence.” Instead of building one‑off toolchains, labs can share code, policies, and evaluation methods on a common reference design, which should make results easier to compare and reproduce across institutions.
Unitree H2 Plus Shows How Reference Designs Accelerate Commercial Robots
Unitree’s H2 Plus highlights how a shared blueprint can shorten the path from research concept to deployable machine. Built on the NVIDIA Isaac GR00T development platform, H2 Plus integrates the same core ideas—open software, Jetson Thor compute, and tactile hands—into a refined humanoid reference design aimed at faster development cycles. Engineering teams can treat H2 Plus as both a testbed and a near‑commercial product, with a human‑scale body, whole‑body control, and multi‑view sensing already tuned for physical AI experiments. This closes the gap between lab prototypes and field‑ready robots, since improvements to perception or manipulation on Isaac GR00T can transfer directly into Unitree’s platform. In effect, NVIDIA’s reference design robotics strategy gives hardware makers a stable "brain and operating system" while they iterate on mechanics, which can accelerate the diversity of humanoid form factors built on the same software foundation.

Democratizing Humanoid Robotics Beyond Elite Labs
By publishing an open humanoid robot design that includes body, compute, and software, NVIDIA is borrowing a page from DIY and hobbyist robotics—only at human scale. Isaac GR00T lowers the barrier for academic labs that previously lacked the budget or engineering staff to assemble a full humanoid stack. Instead of investing years into custom actuators, sensor fusion, and middleware, they can start with standard hardware and concentrate on practical skills such as grasping, tool use, and safe collaboration with people. This shared baseline also makes it easier for smaller institutions to contribute meaningful results, because their algorithms can run on the same reference platform used by better‑funded groups. As more commercial variants like Unitree H2 Plus emerge from the same blueprint, a feedback loop forms: research improves the platform, industry spins out specialized versions, and the broader community gains a more accessible, mature humanoid robotics research platform.