Software Emerges as the New Robotics Innovation Bottleneck
Robotics software challenges describe the growing set of performance, security, and integration issues that limit how quickly developers can turn advanced physical AI concepts into reliable real-world robots. This shift means the main constraints on robotics innovation are now in code, architecture, and certification rather than in motors, sensors, or chips. That is the central finding of BlackBerry QNX’s “Inside the Robot: Architecture Benchmark Report,” based on a survey of 1,000 robotics developers. Almost one in three respondents, or 27%, named software architecture and integration as their biggest performance bottleneck, compared with 16% who pointed to hardware. According to QNX, this signals that future progress depends more on building predictable, secure systems that can mix safety-critical and non-critical workloads than on adding new hardware features. In other words, robot software architecture has become a primary competitive battleground.
From Labs to Lively Streets: Why Physical AI Raises the Stakes
As physical AI development shifts robots from fenced factory cells into busy streets, hospitals, and warehouses, the operating environment is no longer tightly controlled. The QNX research reports that 83% of surveyed teams already deploy robots alongside people, and two‑thirds of those not yet doing so expect human co‑deployment within three to five years. This growing exposure in unconstrained settings pushes reliability, safety, and predictable behavior to the foreground. Nearly all respondents, 95%, say deterministic, real‑time execution is important to the systems they build. Yet 91% still run at least some safety‑critical workloads on general‑purpose operating systems, even though they rate safety‑certified commercial platforms as a better fit. This tension shows why robotics innovation bottlenecks have moved into software: developers must balance flexibility with strict guarantees when lives, equipment, and brand trust are on the line.

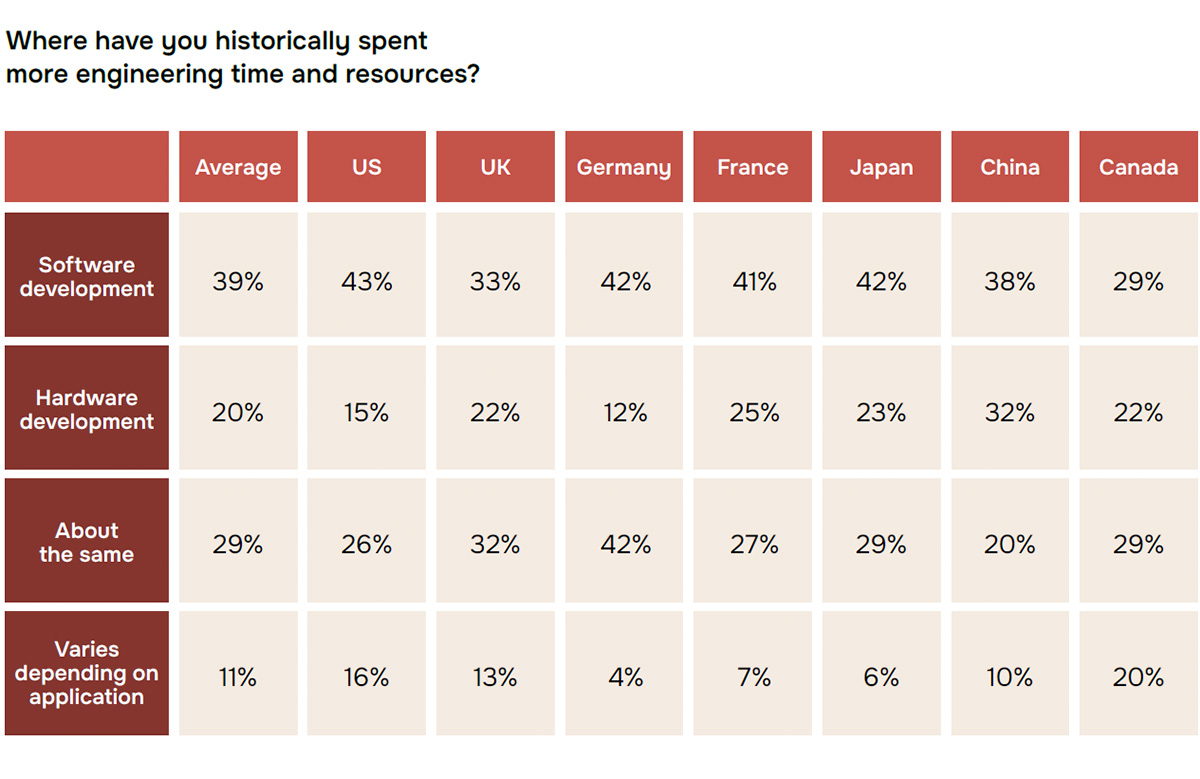
Performance, Security, and Scalability: The Core Software Pain Points
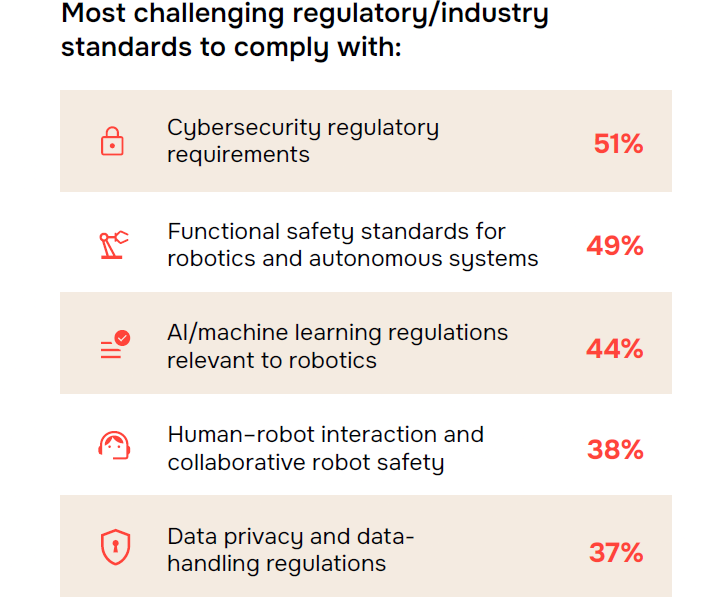
The QNX study and Summit discussions highlight a cluster of recurring robotics software challenges that slow physical AI development. Jim Hirsch of QNX notes that developers “consistently cite four core challenges: integration complexity, certification delays, functional safety risks in human‑machine interaction, and ensuring predictable behavior when it matters most.” These issues map closely to three broad constraints: performance, security, and scalability. Performance means achieving deterministic real‑time control while running AI workloads, often on shared compute. Security spans both cyber threats and the risk of compromised updates in connected fleets. Scalability covers the difficulty of reusing components across products, updating fielded robots, and managing mixed-criticality workloads as fleets grow. Together, these factors explain why sophisticated hardware often remains underused: without a coordinated software strategy, adding compute and sensors does little to remove the robotics innovation bottleneck.
Building Stronger Software Foundations for Physical AI
With hardware advances no longer the primary limit, developers are refocusing on foundational software for physical AI development. The QNX report finds that 85% of respondents expect software to play an even greater role in robotics over the next three to five years. Teams anticipate their biggest investments in AI‑driven decision making and cybersecurity, both at 51%, followed by operating systems and real‑time control software at 37%. This shift reflects a recognition that safe autonomy depends on disciplined robot software architecture: clear separation of critical and non‑critical functions, real‑time operating systems tuned for safety, and integration patterns that reduce complexity. Industry leaders at the Robotics Summit reinforce this message, arguing that by addressing integration complexity, certification delays, and predictable behavior at the architecture level, developers can clear today’s robotics innovation bottleneck and unlock more capable, trustworthy robots.