From Hardware Breakthroughs to Robotics Software Challenges
The physical AI bottleneck in robotics now refers to the point where software performance, safety, and security limitations slow or block progress, even when hardware, sensors, and compute continue to improve and become more capable. That shift is at the heart of new QNX research, which surveyed 1,000 robotics developers worldwide about where projects stall. Almost one in three respondents (27%) named software architecture and integration as their biggest performance bottleneck, compared with 16% who pointed to hardware. Developers say that as robots move out of sealed cages and fixed paths into unconstrained settings, hardware is usually “good enough,” while software lags behind system ambitions. These findings echo a broader industry move from hardware-centric engineering to software-centric design, where reliability, scalability, and predictable behavior are now the main constraints on what next-generation robots can do.

Robots in Human Spaces Raise Security and Safety Stakes
As physical AI systems leave controlled test cells for hospitals, city streets, and busy shop floors, reliability and safety become non‑negotiable. QNX reports that 83% of surveyed robotics teams already deploy systems alongside people, and a further wave expects close human interaction within three to five years. In these mixed environments, robot security issues and software failures can endanger people, disrupt operations, and damage trust faster than any mechanical fault. Nearly all respondents (95%) say deterministic, real‑time execution is important to their systems, yet 91% still run at least some safety‑critical workloads on general‑purpose operating systems instead of safety‑certified platforms. That gap between requirement and reality exposes how software foundations have not caught up with the demands of human‑robot collaboration, even as organizations race to field more capable, autonomous machines.

Performance, Predictability, and Software Scalability in Robotics
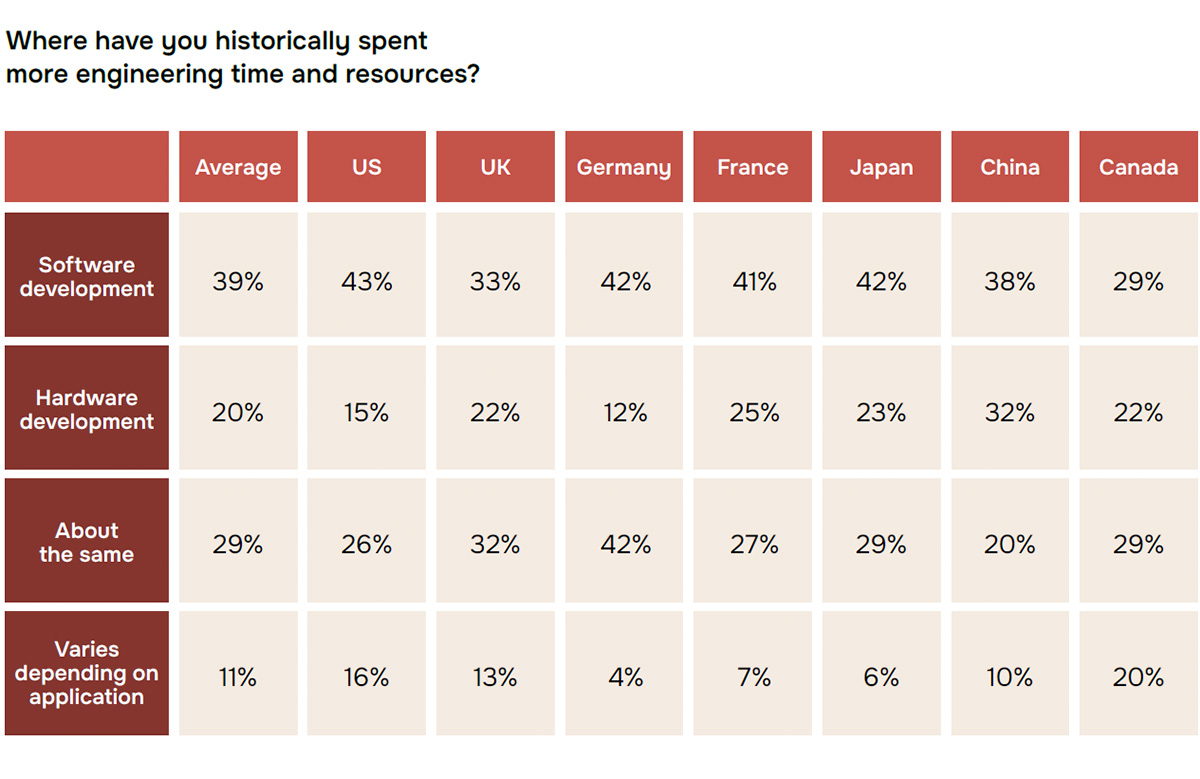
Behind the scenes, most robotics software challenges cluster around performance, predictability, and software scalability in robotics architectures. Developers told QNX that integration complexity is now a top concern as they combine AI, sensing, motion control, and cloud services on the same platforms. Robots must juggle workloads with different levels of criticality—safety, control, perception, and user interfaces—without latency spikes or unpredictable behavior. Yet many teams rely on legacy or general‑purpose stacks that were never designed for this mix. The result is an emerging physical AI bottleneck: hardware accelerators and sensors can see and process more, but the operating systems and middleware struggle to manage timing, resources, and updates at scale. According to QNX, software development already consumes more developer resources than hardware, signaling that the main path to higher performance now runs through better architecture, not faster chips.
Certification, Cybersecurity, and the New Risk Landscape
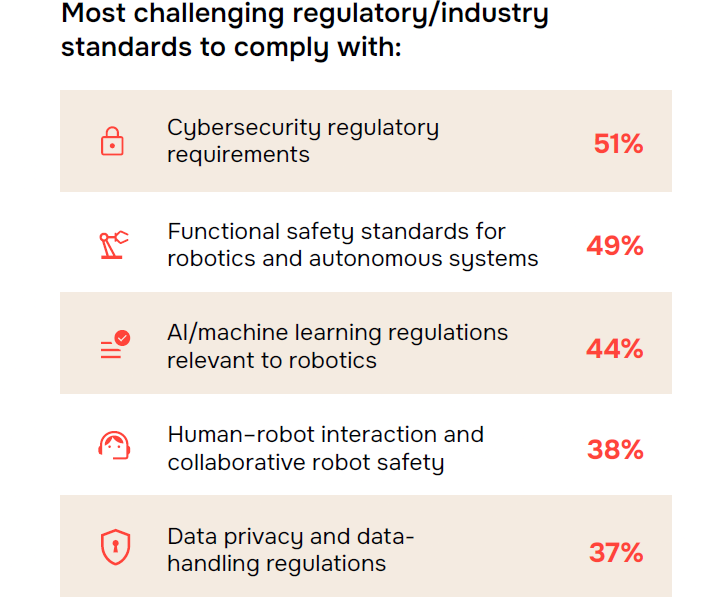
Regulation and security requirements are adding fresh pressure to robotics software foundations. QNX’s benchmark report notes that two‑thirds of respondents have experienced project delays due to certification processes, and many point to cybersecurity and functional safety standards as especially demanding. For robots sharing space with people, those standards are not optional: security flaws can expose networks, while functional safety gaps can turn minor software bugs into physical hazards. Cybersecurity ranks alongside AI‑driven decision making as the top planned investment area, each cited by 51% of developers. This focus reflects a shift from treating security as a late‑stage add‑on to embedding it in operating systems, communication stacks, and deployment pipelines. As robots grow more connected and distributed, the cost of weak software architecture is measured less in performance metrics and more in delays, compliance risk, and lost confidence in physical AI.
From Hardware-Centric Builds to Software-First Robotics Design
Despite the bottlenecks, ambition around physical AI remains high. QNX found that 89% of respondents view AI‑enabled robots that can perceive, reason, and act autonomously as critical to their strategy over the next three to five years. Yet only 29% feel “very confident” in their ability to make safe, predictable decisions in messy real‑world environments. This mismatch is forcing an industry‑wide pivot: instead of starting with mechanical design and adding software later, teams are moving to software‑first architectures. They are planning major investments in AI decision making, cybersecurity, real‑time operating systems, and control software, with the goal of creating predictable, secure, and scalable foundations. If they succeed, the main barrier to physical AI will shift again—from today’s software constraints to how quickly organizations can rethink processes and business models around more capable, autonomous robots.