What This Open Source 3D Printed Humanoid Robot Is
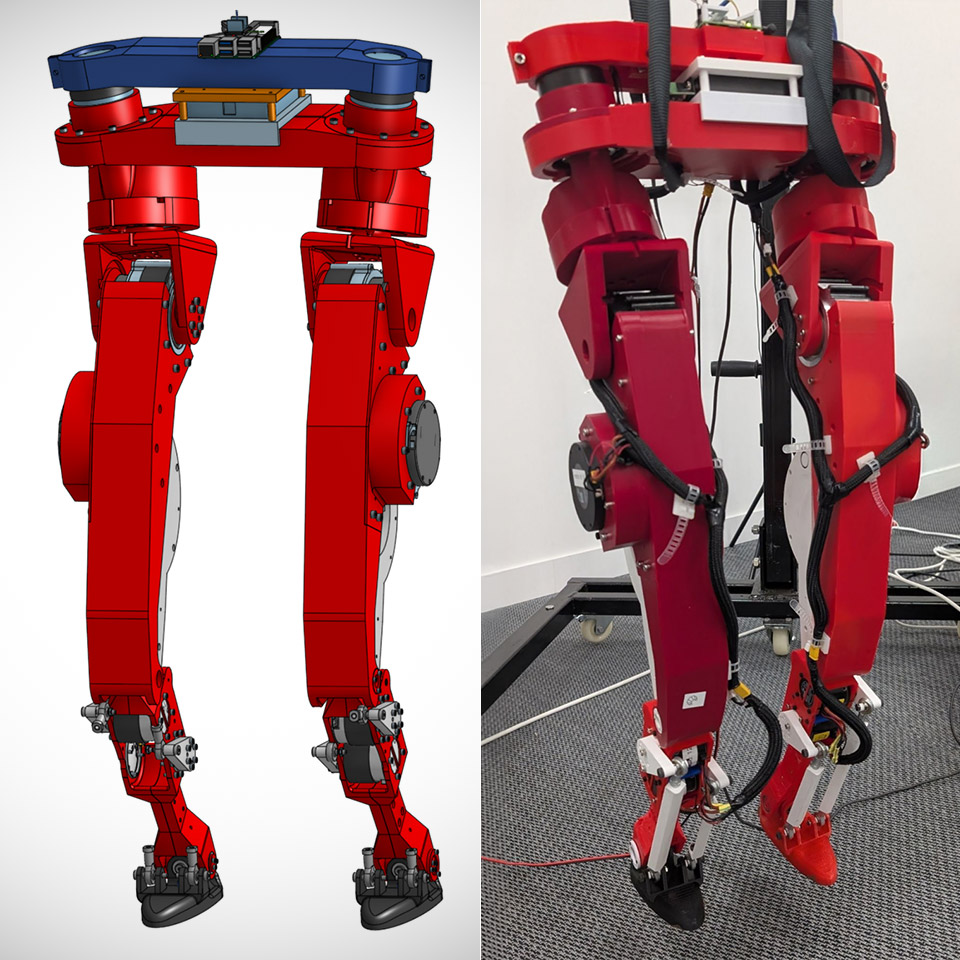
This 3D printed humanoid robot is an open source robotics platform from Hugging Face that combines 75 printable mechanical parts with common actuators and accessible electronics to create a DIY bipedal robot costing roughly USD 2,500 (approx. RM11,500) in components, which makers and researchers can assemble, program, and teach to stand, balance, and walk using shared software tools, simulators, and training examples. As an affordable robot building project, it focuses on the lower body: a torso and two legs divided into modular hip, thigh, knee, shin, ankle, and foot sections. According to TechEBlog, it “relies mostly on 3D-printed pieces plus common actuators and electronics,” turning desktop 3D printers and a modest parts budget into a capable walking research platform. The result is a 3D printed humanoid robot that significantly lowers the entry barrier to legged robotics.
Plan Your DIY Bipedal Robot Build
Before printing or wiring anything, download the open source robotics platform files from Hugging Face’s project page, including the 75 STL files for the torso and both legs and the public Onshape CAD model. The CAD model lets you examine each module—hip mechanisms, thighs, knees, shins, ankles, and feet—and adapt geometry if you want to tweak clearances or aesthetics for your printer. The bill of materials centers on twelve RobStride actuators, an IMU sensor, a Raspberry Pi 5, and a twin‑channel CAN FD adaptor to connect the computer and motors. Expect the full print to use between 3.5 and 4 kg of PLA+ filament, so plan spools accordingly. Decide whether you will follow the reference design or adjust shell thickness, infill, or cable paths to suit your printer and assembly preferences while keeping mounting points compatible.
Print and Prepare the Humanoid Robot’s Mechanical Parts
With the digital plans ready, move to the mechanical side of your 3D printed humanoid robot. Print the parts module by module to avoid confusion, labeling each set as hip, thigh, knee, shin, ankle, or foot. PLA+ is recommended in the source materials, offering a good balance of strength, ease of printing, and low cost, and it also makes later repairs painless because “a broken link or cover can be replicated in PLA+ filament.” Check each piece for warping or layer separation before assembly; structural components like hip frames and shins deserve extra inspection. Lightly sand mating surfaces, clear out bolt holes, and test‑fit bearings and actuator mounts by hand. Since the entire project consumes between 3.5 and 4 kg of filament, you can reprint any part that looks weak instead of risking failures once the DIY bipedal robot begins dynamic walking tests.
Wire the Electronics and Bring the Legs to Life
The electronics turn your affordable robot building project into an active open source robotics platform. Install the Raspberry Pi 5 as the main computer, then connect the twin‑channel CAN FD adaptor that links it to the twelve RobStride actuators: two O0 units near the torso, two O2 units for hip rotation, four O3 units in the thighs, and four O5 units in the shins. Add the IMU so the robot can sense orientation and balance. Hugging Face provides pre‑written scripts to connect each motor over the CAN bus and test power delivery before mechanical assembly. Follow these scripts to verify every actuator responds correctly, and confirm there are no unexpected movements or wiring errors. This staged approach ensures “the robot does not abruptly lurch to life,” making early experiments safer while you learn to control standing and stepping behaviors.
Use Open Source Tools to Teach Standing and Walking
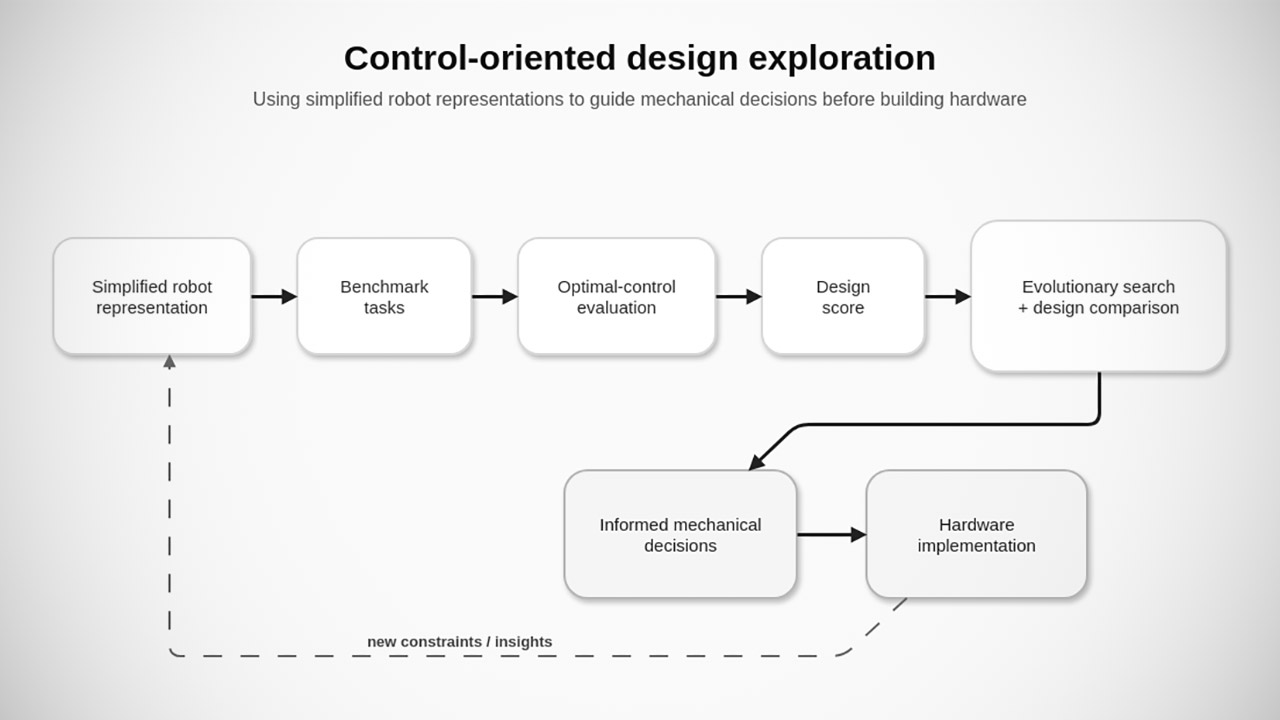
Once your 3D printed humanoid robot is assembled and powered, you can start teaching it to stand, balance, and walk using Hugging Face’s software stack. The full package includes design tools that let you test simplified robot models in simulation, benchmark control strategies, and refine locomotion policies before risking hardware. The runtime tools cover calibration routines, consistent interfaces for both virtual and physical robots, and safe command submission methods. Identification tools then adjust simulator parameters using real‑world logs so the virtual model better matches the actual robot’s behavior. The legged zoo resource provides everything needed to design and evaluate locomotion rules, along with example policies that have been trained in simulation and transferred to the real robot. Because the system connects to the LeRobot library, you can build on existing datasets and models, accelerating experimentation and community‑driven upgrades.