What Cosmos 3 Is and Why Physical AI Needs It
NVIDIA Cosmos 3 is an open-source physical AI foundation model that learns from multimodal data to predict how real-world environments evolve, then generates video and robot actions to guide autonomous systems before they move. Earlier foundation models for robotics tended to focus on perception or language, leaving developers to stitch together separate tools for planning and simulation. Cosmos 3 aims to be a single model that understands scenes, forecasts their dynamics, and proposes actions with high physics accuracy. NVIDIA describes it as a fully open “omnimodel” that works across text, images, video, ambient sound, and action trajectories, and says it can shrink physical AI training and evaluation cycles from months to days. For teams building physical AI models, this shifts robot vision training from static labeling to predictive world modeling AI.

Inside the Mixture-of-Transformers World Modeling Architecture
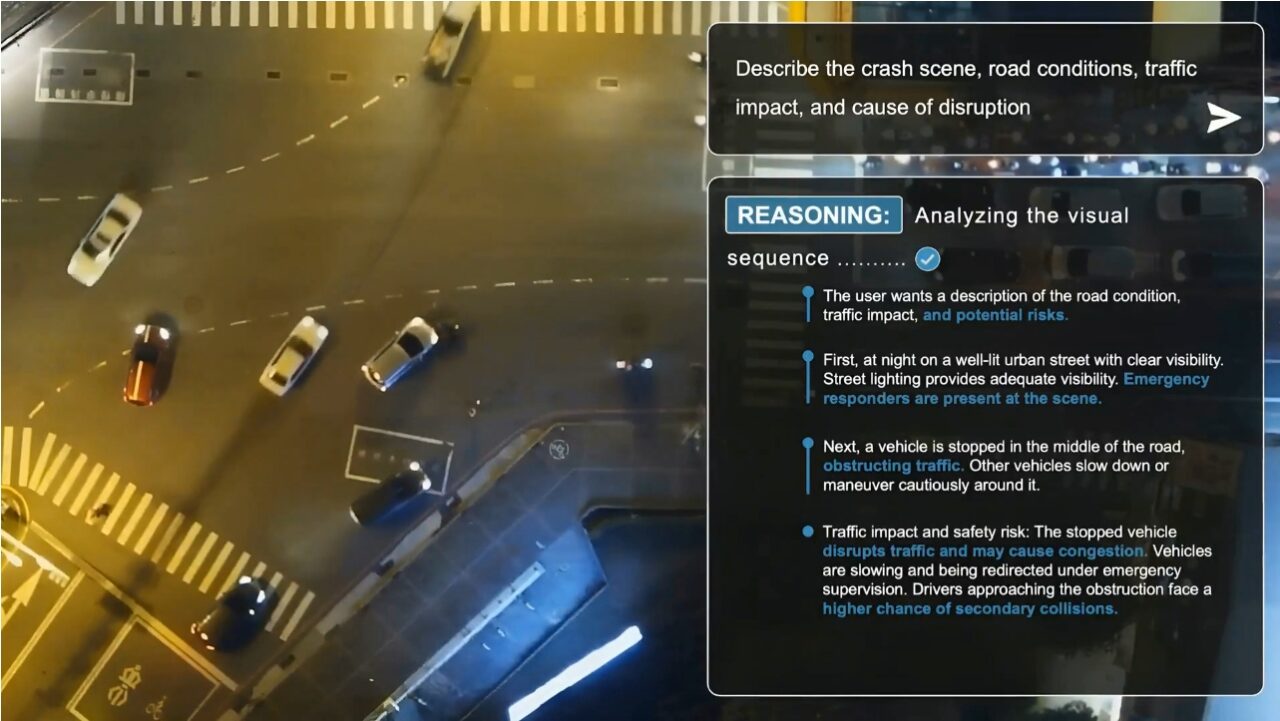
At the core of Cosmos 3 is a mixture-of-transformers design that turns raw sensory input into future-aware predictions. One transformer block focuses on multimodal reasoning: it parses objects, motion, and spatial–temporal relationships in a scene across video frames, text prompts, and ambient sound. A second expert generation transformer then produces grounded outputs, including synthetic video and detailed action trajectories. According to NVIDIA, this pairing “enables Cosmos 3 to understand object interactions, motion and spatial-temporal relationships before generating video and action trajectories.” Because the model was trained on billions of samples covering text, images, video, sound, and robot actions, it behaves as a general-purpose world modeling AI engine. Developers can use it as a vision language model, a world model for future-state prediction, or the backbone for world action models that specialise in specific robotic tasks.
From Robot Vision Training to Action: Practical Uses for Developers
Cosmos 3 is built to convert scene understanding into executable behaviour, which is where physical AI models often fail in real deployments. The model can output structured robot data such as joint angles, gripper positions, and trajectory points, ready to plug into planning and control pipelines. That means a single foundation model can support robot vision training, policy learning, and test-time prediction for autonomous systems AI. It can also generate physically plausible video sequences of rare or risky situations, giving teams synthetic data for validation without exposing hardware to danger. Cosmos 3 delivers leading open-model scores on benchmarks such as Physics-IQ, PAI-Bench, RoboLab, RoboArena, and VANTAGE-Bench, signalling that its world generation and action policies transfer across tasks. For developers, this reduces data collection overhead while improving consistency between simulated and real-world robot behaviour.
OpenMDW, Cosmos Coalition, and the Future of Foundation Models in Robotics
Cosmos 3’s impact is tied to how easily robotics teams can adopt and extend it. Support for the OpenMDW-1.1 framework means model weights, code, documentation, datasets, and benchmarks sit under a single model-centric license, so teams can train, modify, contribute, redistribute, and deploy without juggling separate legal terms. Developers can experiment on build.nvidia.com, or pull open models from GitHub and Hugging Face, making Cosmos 3 a practical starting point for foundation models robotics projects. NVIDIA has also formed the Cosmos Coalition with partners including Agile Robots, Black Forest Labs, Generalist, LTX, Runway, and Skild AI to push shared progress on world modeling AI. Jensen Huang calls Cosmos 3 “a generational leap in ability to build robots, autonomous vehicles and vision AI that perceive, reason, plan and act in the physical world,” and the open approach should accelerate community-driven innovation.