When Physical AI Runs Faster Than Its Software
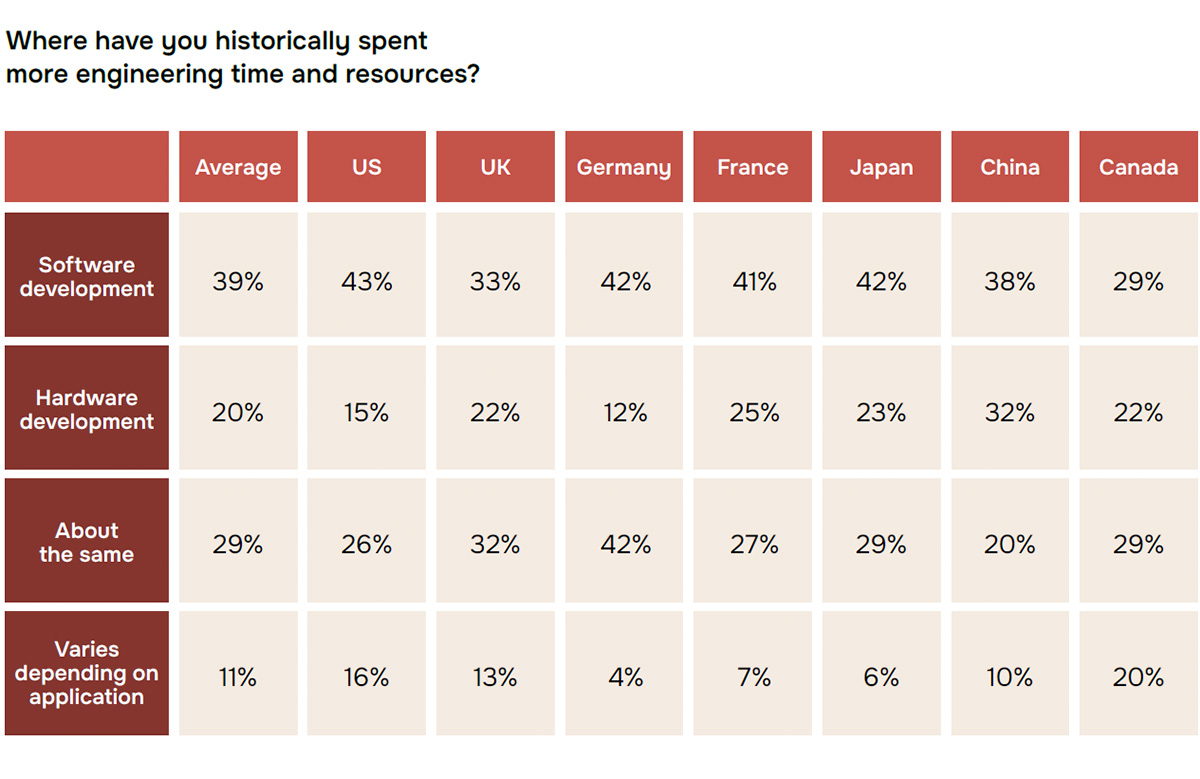
Software bottlenecks in robotics are the growing set of performance, security, and integration limits in code and operating systems that slow or block the deployment of advanced, AI‑enabled machines into the real world, even as mechanical and sensing hardware continues to improve rapidly. That tension is now front and center. QNX’s new “Inside the Robot: Architecture Benchmark Report” surveyed 1,000 robotics developers and found that almost one in three (27%) see software architecture and integration as their biggest performance bottleneck, compared with 16% who point to hardware. Robotics hardware—from sensors to compute to actuators—has advanced quickly enough that it is no longer the main constraint. Instead, robotics software challenges such as timing predictability, embedded software security, and safe AI decision making are becoming the main robotics innovation constraints, especially as “physical AI” robots move from labs and cages into streets, hospitals, and shop floors.
Robots Enter Human Spaces, Raising Software Stakes
As robots leave fenced industrial cells and fixed warehouse lanes, their software must handle unconstrained, human‑filled environments. The QNX research reports that more than four in five respondents (83%) already have systems operating alongside people, and many of the rest expect to reach that point within a few years. Nearly all respondents (95%) say deterministic, real‑time execution is important for the systems they develop, yet 91% still rely at least partly on general‑purpose operating systems that were not designed for safety‑critical or hard real‑time use. This gap is a clear physical AI bottleneck: the hardware can move and sense fast, but the software infrastructure struggles to guarantee predictable behavior when a person steps into a robot’s path. These deployments turn reliability, predictable control, and embedded software security into core design requirements rather than optional extras.

Certification, Security, and the Drag on Deployment
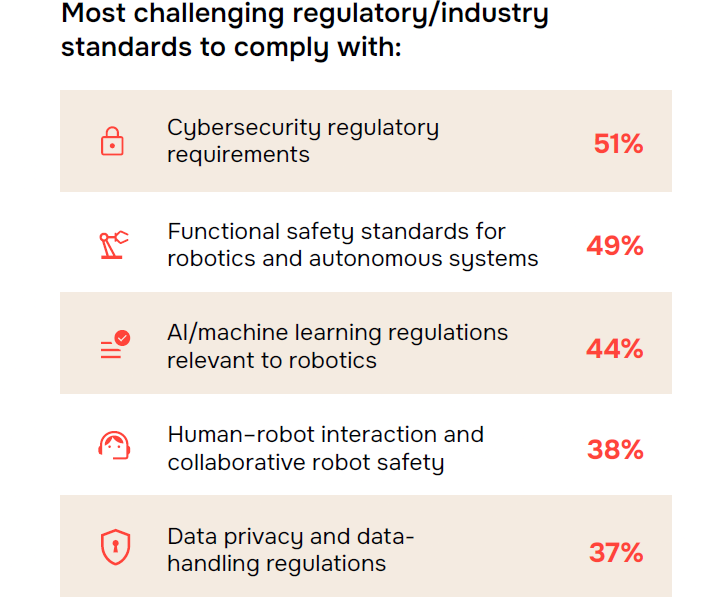
Regulation is amplifying the software burden. As robotic systems gain autonomy and share space with people, they must meet functional safety and cybersecurity standards that many teams find hard to satisfy with current architectures. In the QNX survey, two‑thirds of respondents report project delays caused by certification processes. Developers single out compliance with cybersecurity frameworks such as ISO/SAE 21434 and functional safety standards such as ISO 10218 as among the most challenging tasks. This reflects how embedded software security and safety analysis now shape release schedules and design choices. The reliance on general‑purpose operating systems adds friction, because they were not built for clear safety cases or strict partitioning between mixed‑criticality workloads. The result is a growing mismatch between ambitious physical AI roadmaps and an underlying software stack that slows audits, complicates hazard analysis, and stretches project timelines.
Developers Pivot to Software Foundations
Faced with these robotics software challenges, developers are shifting investment from hardware upgrades to software foundations. According to QNX, 85% of surveyed developers expect software to play an even greater role in robotics over the next three to five years, with teams planning their largest investments in AI‑driven decision making and cybersecurity (both at 51%), followed by operating systems and real‑time control software (37%). This indicates a deliberate effort to replace brittle, ad‑hoc stacks with architectures that can scale across fleets, support mixed safety levels, and keep security defenses current. Panel discussions at the Robotics Summit & Expo echoed this theme, with participants highlighting integration complexity, certification delays, and predictable behavior as solvable problems if teams treat the operating system, middleware, and tooling as strategic assets, not afterthoughts. Stronger bases promise faster iteration and safer deployment for the next wave of physical AI robots.

From Bottleneck to Enabler for Physical AI
Despite today’s robotics innovation constraints, the survey results display optimism about physical AI. QNX reports that 89% of respondents say AI‑enabled robots that can perceive, reason, and act autonomously in the physical world will be critical to their organization’s strategy within the next three to five years, yet only 29% feel very confident in their ability to make safe, predictable decisions in real‑world environments. Bridging that confidence gap will depend less on new sensors or motors and more on disciplined software engineering. Priorities include real‑time operating systems with clear safety pedigrees, stronger isolation between components of different criticality, and security‑first design for connected robots. If developers succeed, the same software stack that now slows progress could become the main enabler, turning physical AI bottlenecks into a reliable launchpad for large‑scale, trustworthy deployment.