From metal to code: why software is the new choke point
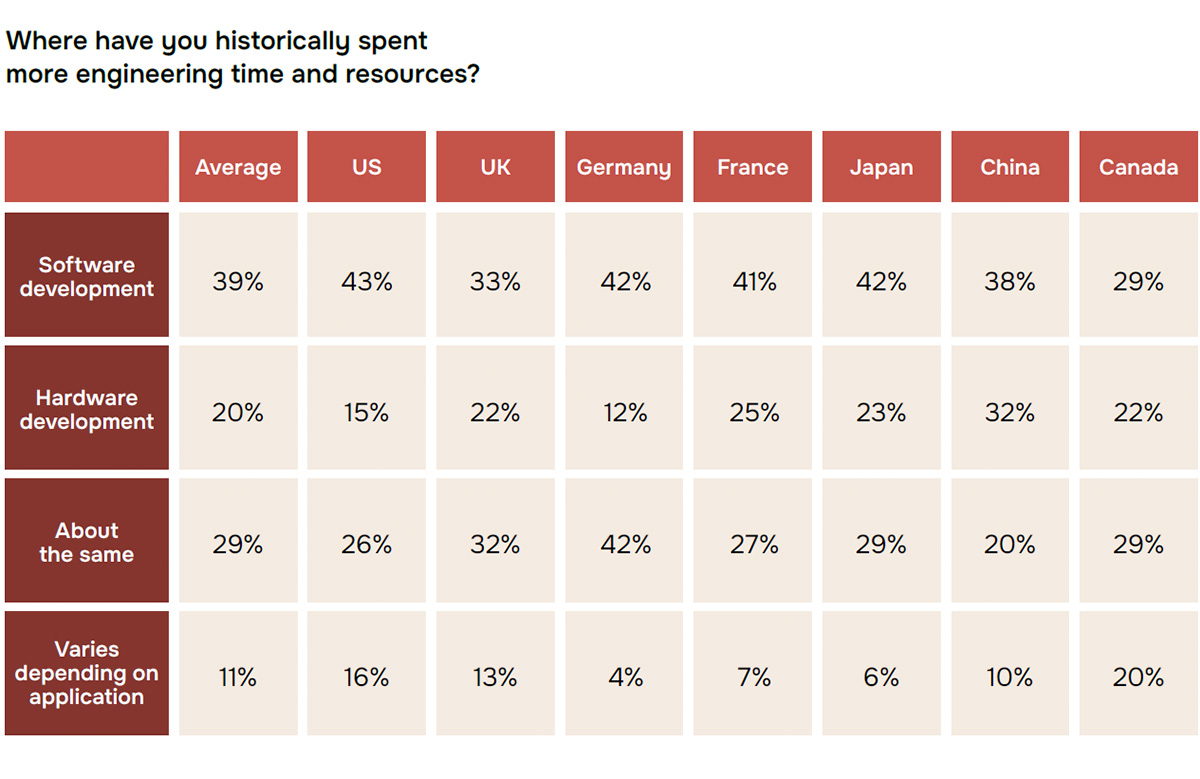
Software bottlenecks in robotics refer to the growing set of architectural, security, integration, and real-time control challenges that limit AI robot deployment more than hardware constraints as systems operate in open, human environments. QNX’s new “Inside the Robot: Architecture Benchmark Report” shows how robotics software development has overtaken hardware as the main barrier to progress. Almost one in three developers (27%) now name software architecture and integration as their biggest performance bottleneck, compared with 16% who point to hardware. This shift tracks the move from robots in tightly controlled factory cells to physical AI operating in city streets, surgical suites, and busy shop floors. As systems gain more autonomy and interact with people, the decisive questions are less about motors or sensors and more about deterministic behavior, cybersecurity, and the ability to manage mixed‑criticality workloads safely at scale.
Robotics development goes software‑first
The QNX survey of 1,000 robotics developers and engineers shows a sector in the middle of a software‑first transition. Robotics software development now consumes more developer resources than hardware, reflecting the complexity of autonomous systems architecture. According to QNX, 85% of developers expect software to play an even greater role in robotics over the next three to five years. Teams plan their largest investments in AI‑driven decision making and cybersecurity, both cited by 51% of respondents, followed by operating systems and real‑time control software at 37%. This pattern underscores how operating systems, middleware, and safety‑certified components are becoming strategic assets rather than afterthoughts. Instead of treating code as glue between sensors and actuators, leading teams are redesigning their stacks around predictability, modularity, and clear separation of safety‑critical and non‑critical functions to make field deployment and updates more manageable.

Robots beside people raise the stakes for safety and timing
As AI robot deployment moves into unconstrained environments, safety expectations climb sharply. More than four in five respondents (83%) say their systems already operate alongside people, and among those that do not, 67% expect human‑robot co‑location within three to five years. In these settings, the software bottleneck in robotics is less about adding features and more about guaranteeing behavior when something unexpected happens. Nearly all developers (95%) say deterministic, real‑time execution is important for the systems they build. Yet 91% still run at least part of their workloads on general‑purpose operating systems that were not designed for real‑time or safety‑critical use, even though safety‑certified commercial platforms are rated as a better fit. That gap highlights a core tension in autonomous systems architecture: teams want the flexibility of mainstream software tools while needing strict timing guarantees to protect people nearby.

Certification, security and the drag on deployment
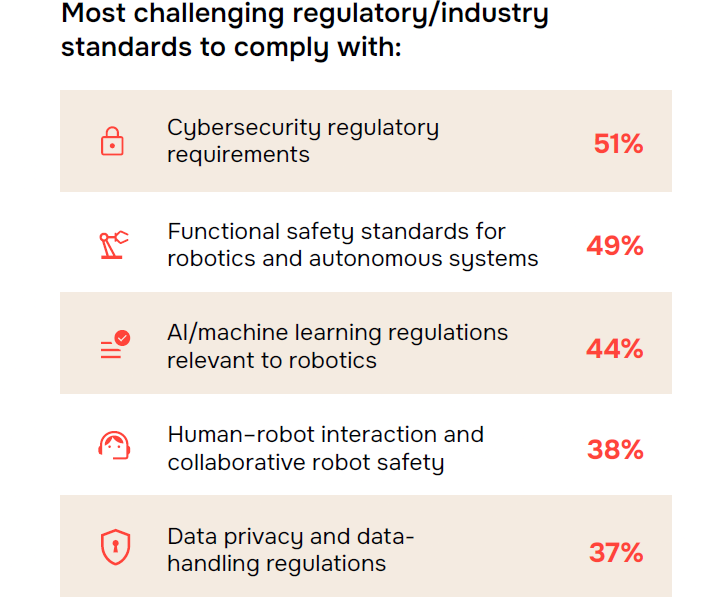
Security and compliance pressures turn software architecture choices into business risks. Two‑thirds of surveyed teams report project delays caused by certification processes. Cybersecurity requirements, such as ISO/SAE 21434, and functional safety standards, such as ISO 10218, are among the hardest to meet, each cited by about half of respondents. These hurdles compound existing integration complexity and slow AI robot deployment. Developers must show that autonomous systems architecture can contain failures, protect data, and maintain predictable behavior even as AI models evolve and new features roll out. QNX executives describe four recurring pain points: integration complexity, certification delays, functional safety risks in human‑machine interaction, and ensuring predictable behavior “when it matters most.” The result is a growing push toward stronger base operating systems, isolation of safety‑critical components, and built‑in cybersecurity instead of bolt‑on fixes late in the project.
What needs to change for software to stop holding robots back
If software is the main brake on robotics innovation, the path forward centers on building better foundations rather than chasing new sensors or actuators. The QNX research suggests that scalable, secure architectures for physical AI must combine safety‑certified real‑time operating systems for critical tasks with more flexible environments for higher‑level AI workloads, all tied together by well‑defined interfaces and observability. Developers need patterns for mixed‑criticality systems, where perception, planning, and control can evolve without constant recertification of the entire stack. They also need security baked into communications and update mechanisms so deployed fleets stay trustworthy over time. As software architecture and integration become the dominant challenges, robotics software development is shifting from project‑by‑project engineering to platform thinking, in which teams treat operating systems and middleware as long‑term assets that determine how fast the next generation of robots can safely reach the real world.