
Start with a Solid Plan: What Changes When You Scale an Arduino Bot
Scaling Arduino robots from palm-sized toys into large, rolling machines is not just a matter of printing bigger parts. When you enlarge robot projects, every design decision gets magnified: weight grows faster than surface area, motors face higher loads, and frames that were once “good enough” begin to flex or crack. Successful DIY robot scaling starts with revisiting the original Arduino bot design and listing what must stay identical (behavior, code structure, sensor logic) versus what must adapt (motors, chassis, power system). A clear scaling factor, such as seven times the original size, helps you estimate new dimensions and forces early in the process. From there, you can plan upgrades in three key areas: mechanical structure, sensing and navigation, and power delivery. Treat the bigger bot as a new prototype inspired by the old one, not just a blown-up replica.
Mechanical Scaling: Motors, Weight Distribution, and Structural Integrity
Once a robot grows, mechanical issues dominate. Weight distribution becomes critical: batteries, motors, and frames all get heavier, so you need a low center of gravity and balanced load over the wheels. In UncleStem’s seven-times-larger tortoise bot, the tiny hobby motors of the original were replaced with 24-volt motors from children’s ride-on toys, providing enough torque to move a heavy chassis. Custom shells slide over these motors so they still resemble the original design, proving that performance upgrades can coexist with visual continuity. Structural integrity also changes; parts that were easy to laser-cut at small scale may exceed the capacity of typical workshop tools when enlarged. For the giant tortoise bot, laser-cut plywood patterns were translated into large sheets of 1 mm acrylic cut professionally, ensuring clean edges and repeatable mounting points. Always validate your chassis by loading it gradually and watching for flex, cracks, or wheel misalignment.

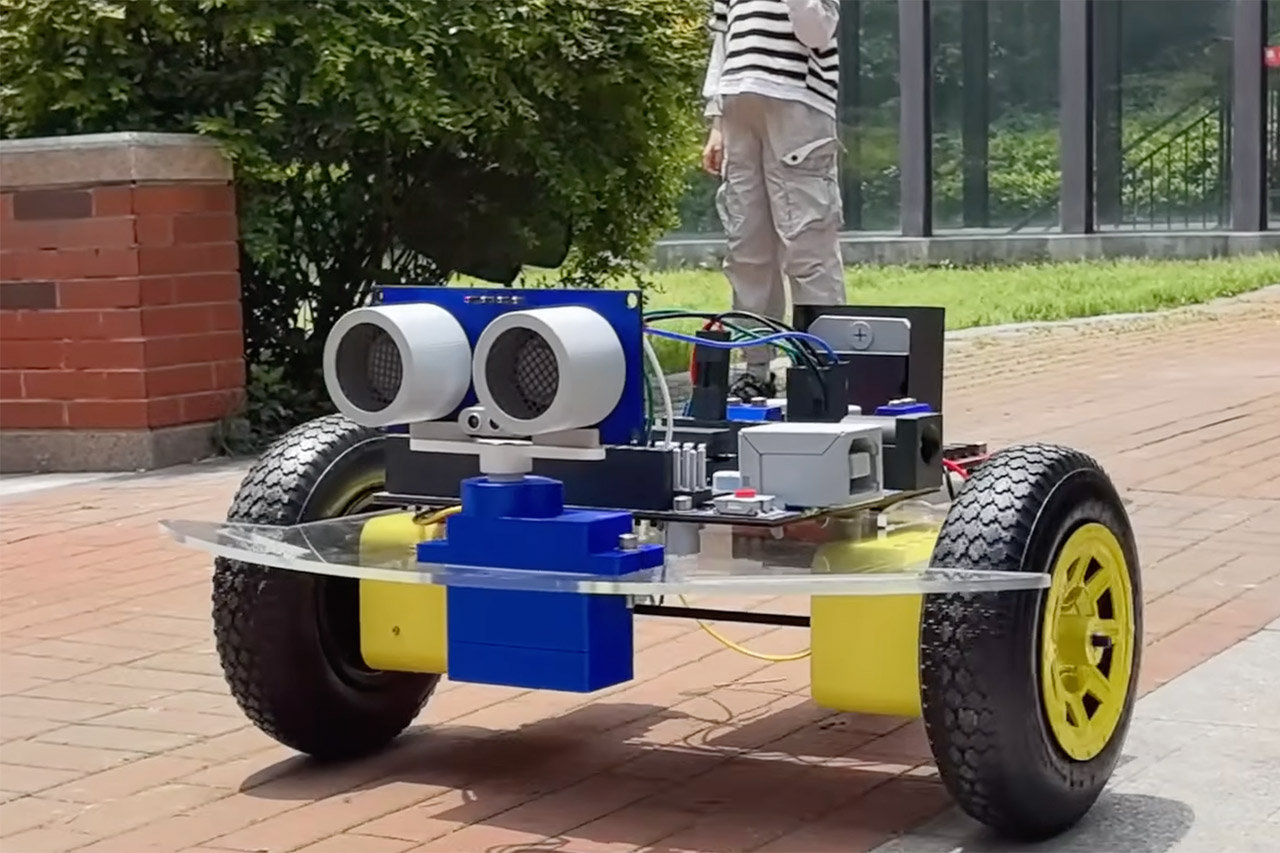
Scaling Sensors and Control: Keeping Navigation Accurate on Larger Robots
Bigger robots need more careful sensor planning to maintain accurate obstacle detection and navigation. When scaling Arduino robots, it is tempting to simply mount a larger-looking ultrasonic module or expand sensor spacing, but that can distort the geometry your code depends on. UncleStem solved this by hiding a standard ultrasonic distance sensor inside a dummy outer shell that visually matches the scaled hardware. The functional sensor sits in a small 3D-printed housing, preserving its operating range and beam pattern while the robot appears fully enlarged. Control electronics followed the same philosophy: a giant Arduino Uno board acts as the visual centerpiece, yet a regular Arduino Nano tucked inside does the real processing. Oversized jumper wires are actually metal rods, echoing the original layout. This approach allows you to reuse proven code and sensor logic, reducing bugs while giving the illusion of a fully scaled-up control stack.
Power Management for Enlarged Arduino Robots
Enlarging robot projects nearly always means higher current draw and more demanding power management. Larger DC motors, like the 24-volt ride-on units in the tortoise bot, require motor drivers capable of handling significant power without overheating or throttling. In the giant tortoise case study, the builder used a scaled-up equivalent of an L298N motor driver mounted on a three-layer plywood board and paired it with a 300 watt driver for the big motors. A separate voltage regulator steps the supply down to 5 volts for the Arduino Nano and sensors, keeping logic levels safe and stable. When planning your own scaled Arduino bot design, isolate high-current paths from delicate electronics, and include fuses or breakers to protect against shorts. Test power systems incrementally: first power the controller alone, then add motors at low duty cycles, watching for brownouts, resets, and excessive heat along the way.
Testing, Calibration, and Iteration for Oversized Prototypes
Large robots carry more momentum and can do more damage, so thorough testing and calibration are essential. Begin with slow-speed trials in a controlled space, verifying basic behaviors: driving straight, stopping reliably, and executing turns without tipping or wheel slip. For navigation routines like the tortoise bot’s “drive forward until an obstacle, then scan left-center-right” algorithm, confirm that sensor readings still match physical distances at the new scale. If the robot over- or undershoots turns, adjust motor driver PWM mappings and recalibrate any timing-based movement assumptions you inherited from the smaller version. Record how far the bot travels for a given command and tune constants accordingly. Use logs or serial output to observe sensor noise and motor responses. Finally, iterate on mechanics and code together: small tweaks to wheel alignment, weight placement, or acceleration ramps often make oversized prototypes feel as responsive as their smaller ancestors.