What a DIY Humanoid Robot Is and Why It Matters
A DIY humanoid robot is a bipedal machine that hobbyists and researchers assemble themselves from 3D‑printed parts, off‑the‑shelf electronics, and open source robot plans to explore walking, balance, and control algorithms without buying a commercial robot. Instead of relying on expensive, proprietary platforms, builders can print structural pieces, add standard actuators, and program behaviors on an accessible computer like a single‑board PC. This mix of 3D printed robotics and common hardware lowers the entry barrier for affordable robotics kit projects at home, in labs, or in classrooms. The LeRobot Humanoid platform released by Hugging Face shows how a design that once required corporate budgets can now be reproduced by serious hobbyists and students, turning robotics from a closed product into a flexible, modifiable learning tool.
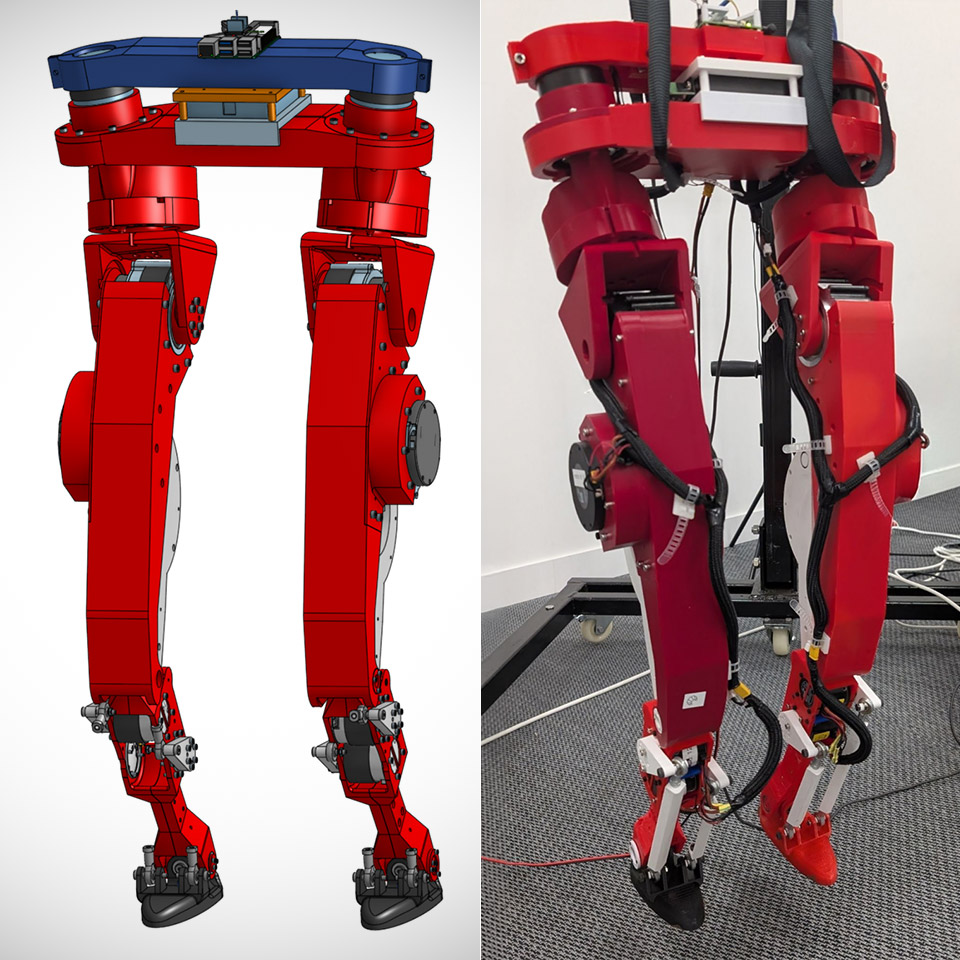
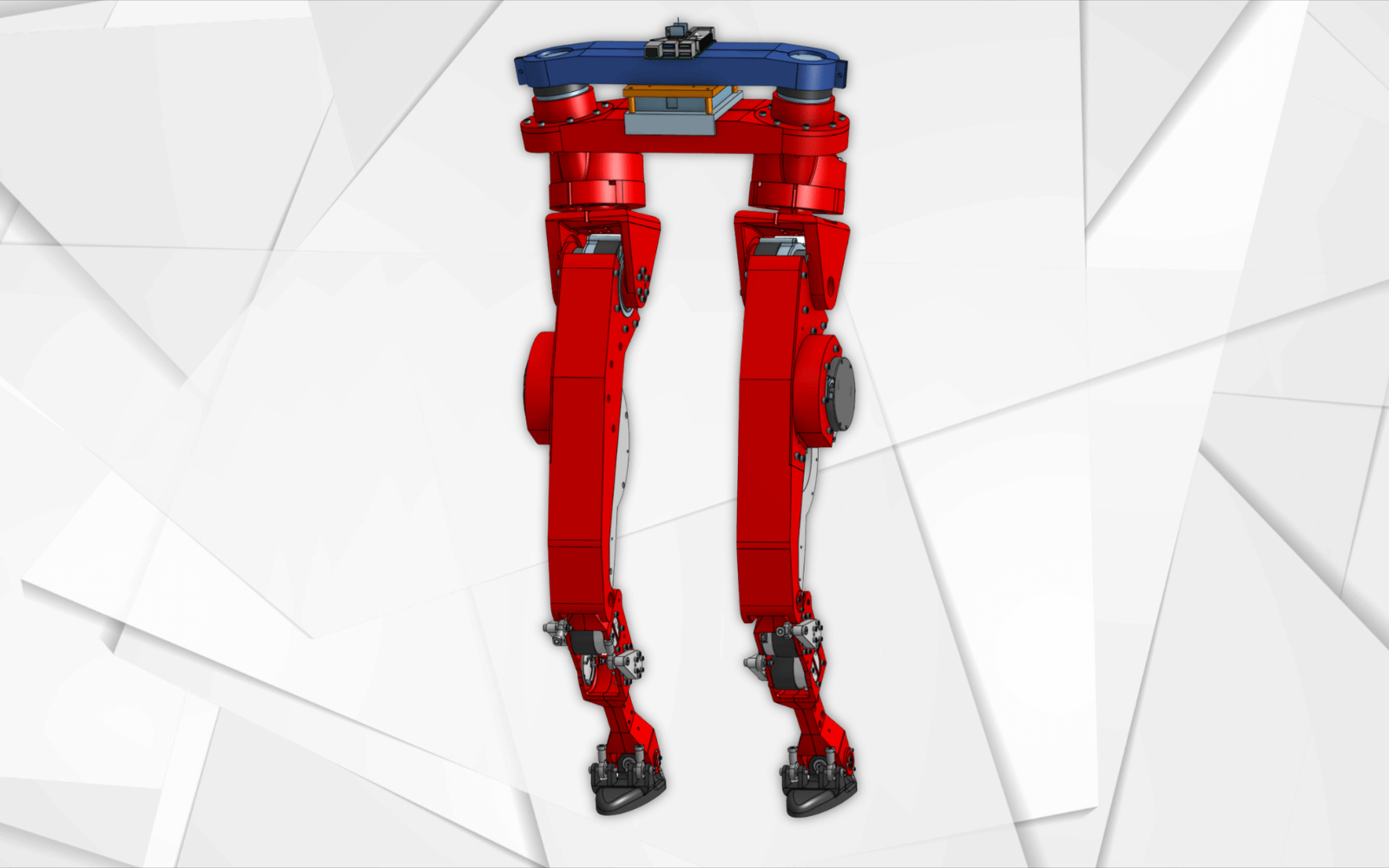
Inside the LeRobot Humanoid: Printable Parts and Modular Design
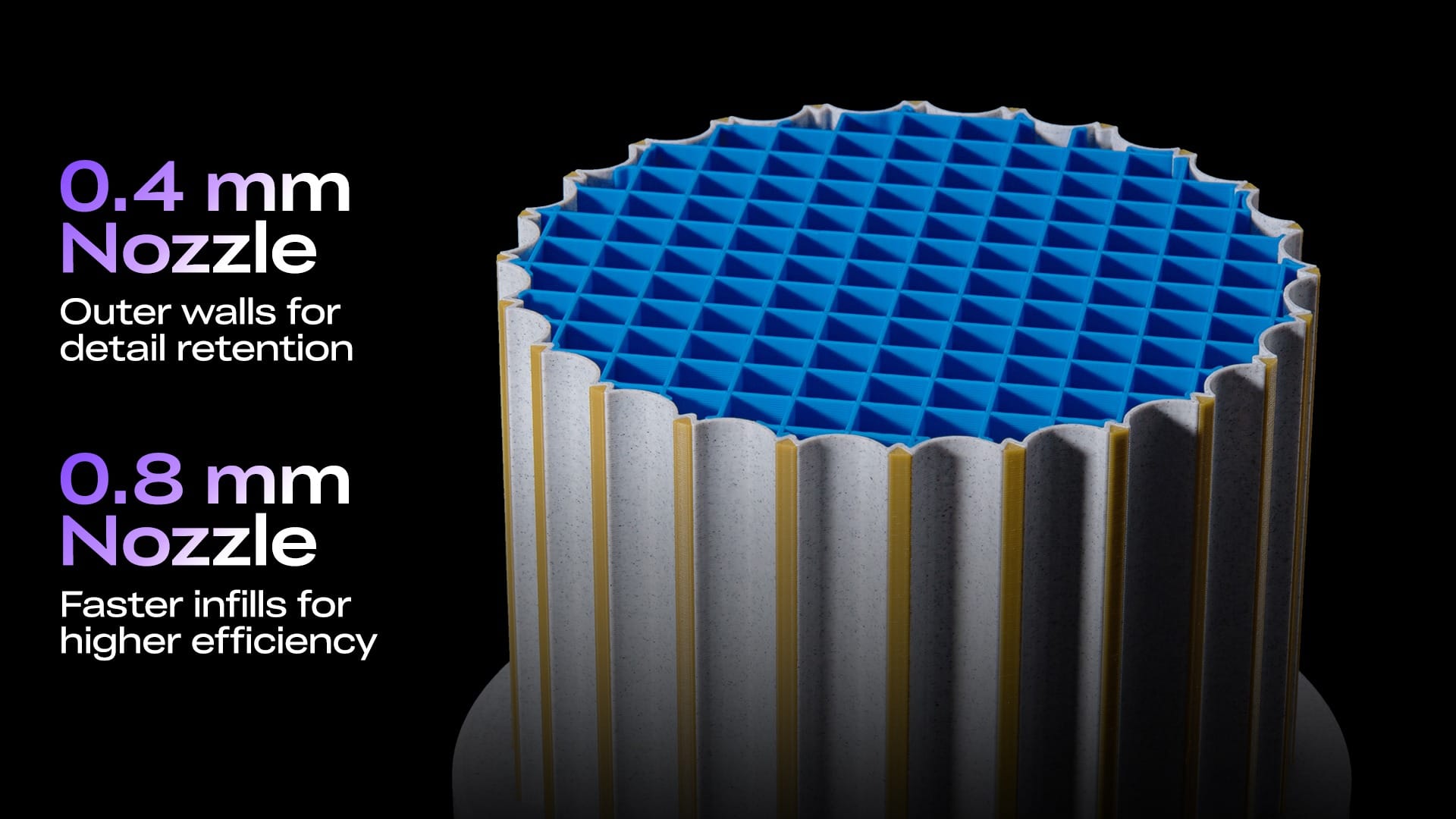
Hugging Face’s bipedal LeRobot Humanoid is built around 75 printable files that form the torso and both legs, divided into modular hip, thigh, knee, shin, ankle, and foot sections. According to TechEBlog, “Hugging Face has shared complete plans for a bipedal robot platform that costs roughly $2,500 in parts and relies mostly on 3D-printed pieces plus common actuators and electronics.” Builders can examine or adapt the geometry in a public Onshape CAD model before printing, which makes customization straightforward. Structural parts are printed in PLA+ and weigh around 3.5 to 4 kg of filament in total, keeping replacement and experimentation costs low. This architecture turns the robot into a practical 3D printed robotics project, where broken links or covers are easy to reprint and design tweaks can be tested rapidly, encouraging iteration instead of cautious, one‑off builds.
Electronics, Actuators, and Control: What You Need to Buy
Beyond printed plastic, the LeRobot Humanoid relies on standard electronics and actuators arranged in a clear, documented layout. Twelve RobStride actuators power the robot: O0 units near the torso, O2 units handling hip rotation, O3 units driving the thighs, and O5 units controlling the shins. An IMU sensor tracks orientation and movement, while a Raspberry Pi 5 acts as the main computer. A twin‑channel CAN FD adaptor links the Pi to the actuators, with pre‑written scripts to connect each motor over the CAN bus before mechanical assembly begins. This combination turns the platform into an affordable robotics kit that builders can source from typical online suppliers. Careful power‑up tests and staged wiring checks keep the DIY humanoid robot from lurching unexpectedly, helping new builders develop safe electrical habits alongside mechanical skills.
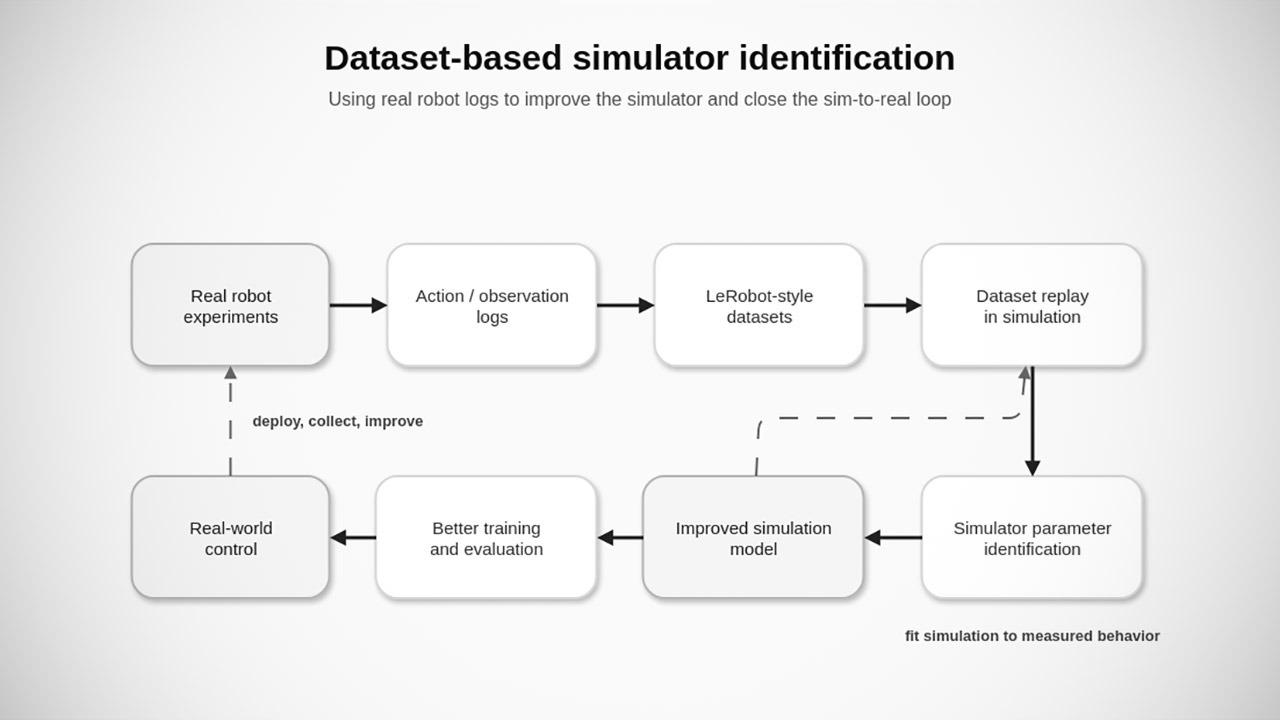
From Simulator to Standing Robot: Software and Learning Tools
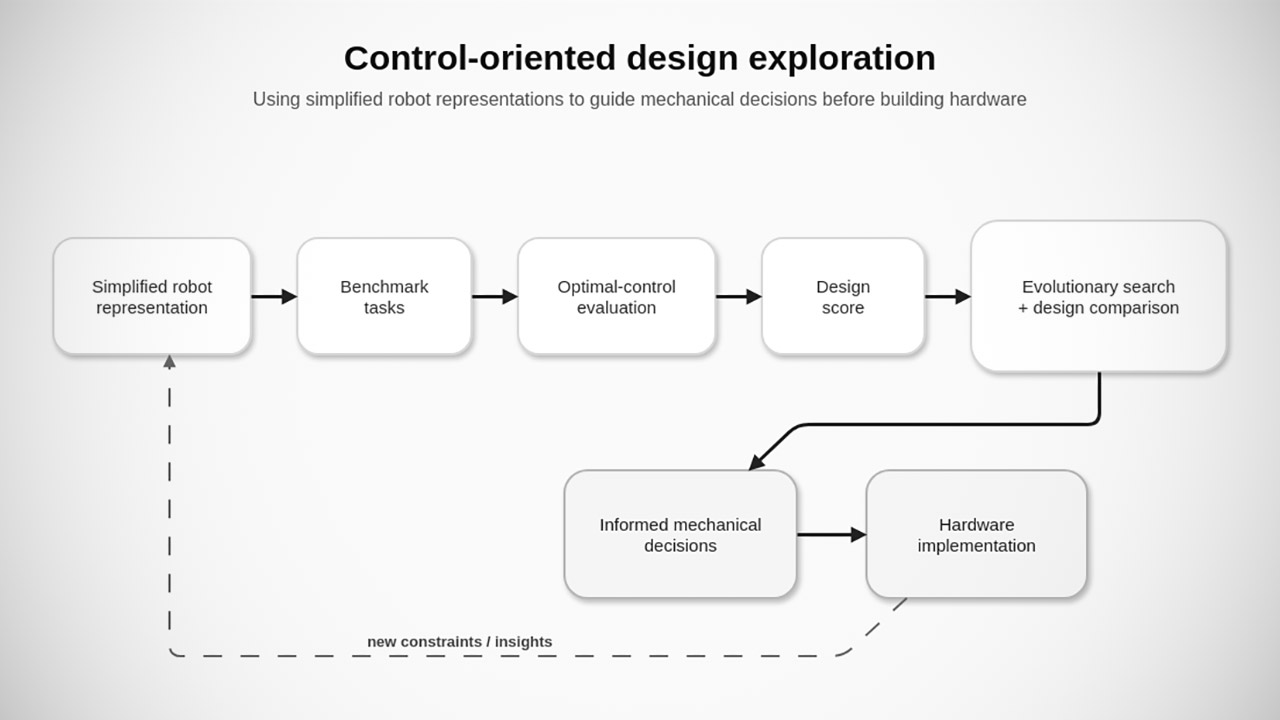
LeRobot is not just hardware; the open source robot plans include a full software stack for simulation, calibration, and control. Design tools let users trial simplified versions of the robot against benchmark tasks before printing, making it easier to compare different control strategies. The runtime package offers calibration procedures, a single interface that works in both simulation and reality, and safe ways to send commands. Identification tools then use logs from real‑world tests to refine the simulator so virtual behavior matches the physical robot more closely. The included “legged zoo” resource gives builders everything needed to design locomotion policies and try early walking controllers trained in simulation on the real machine. This unified pipeline shortens the gap between code and motion, allowing hobbyists to teach their DIY humanoid robot to stand and balance with research‑grade tools.
How Makers and YouTube Creators Are Democratizing Humanoid Robotics
Projects like LeRobot Humanoid and earlier platforms such as Berkeley Humanoid Lite signal a shift away from humanoid robots being available only to large companies with big budgets. One source notes that building some downloadable robotic legs today still requires significant funds and a 3D printer, yet the LeRobot legs cost less than a quarter of one commercial humanoid’s price. YouTube creators are turning these designs into step‑by‑step tutorials, filming assembly, wiring, and debugging so others can follow along. They explain how to print parts, tune actuators, and test locomotion policies, turning complex mechanics into repeatable lessons. This growing library of videos, code repositories, and shared CAD files means a motivated builder can move from watching a practical engineering build to printing, wiring, and programming an affordable DIY humanoid robot in their own workshop or classroom.