What Cosmos 3 Is and Why It Matters for Physical AI
NVIDIA Cosmos 3 is an open world foundation model for physical AI that unifies scene understanding, world modeling, and action generation so robots and autonomous systems can reason about real environments before they move. Instead of training separate models for perception, prediction, and control, developers can use Cosmos 3 as a single "omnimodel" that understands and generates text, images, video, sound, and action sequences for robot vision systems and autonomous vehicle training. According to NVIDIA, Cosmos 3 targets robots, autonomous vehicles, and large vision systems that must interpret changing real-world scenes, predict what is likely to happen next, and select safe, task-relevant actions. By focusing on world modeling AI for physical AI robotics, the model aims to cut trial-and-error in the real world and replace it with safer, repeatable training in simulated environments before deployment.
Inside the Mixture-of-Transformers: Reasoner and Generator Towers
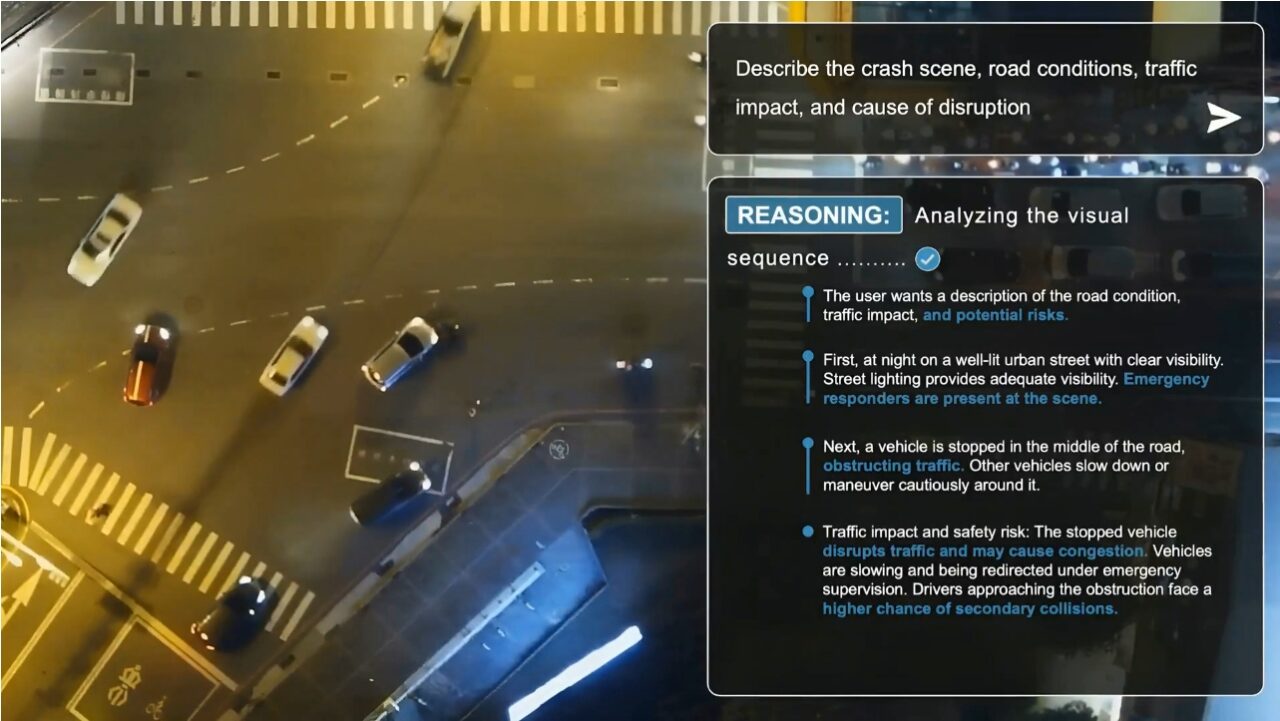
Cosmos 3’s architecture is built around a mixture-of-transformers design that merges physical reasoning with generation in one model. The reasoner tower is a vision-language model that reads multimodal inputs—images, video, and text—to understand motion, object interactions, and physical context. It works autoregressively, forming a structured description of what is happening in the scene. The generator tower then uses a diffusion-based process to create physics-aware video and action sequences, conditioned on the reasoner’s understanding. This means the model does not generate frames or actions blindly; it predicts what should happen next in the world given the inferred state. Because reasoning and generation share one model instead of multiple glued-together systems, developers avoid complex orchestration logic and latency overhead, and can more easily build world modeling AI that spans perception, prediction, and control in a single pipeline.
From World Modeling to Action: Training Robots Before They Touch Hardware
Cosmos 3 is designed to shorten development cycles by shifting more of physical AI training into simulation. It can take text, image, and video inputs, then output future video or explicit action sequences for robot learning, enabling simulated practice before real-world deployment. For example, the model can act as an action-conditioned world model: given a proposed robot action and the current camera feed, it predicts the resulting scene video. This allows engineers to test and refine policies for robot arms, warehouse monitoring, or autonomous vehicle training on rare edge cases without putting hardware or people at risk. NVIDIA provides synthetic datasets for embodied robot scenes, physical interaction, spatial reasoning, human motion, driving, and warehouse environments, so teams can post-train Cosmos 3 or build custom robot vision systems that already "know" how similar scenes behave before meeting a live production floor.
Model Sizes, Open Ecosystem, and Integration via OpenMDW
To match different deployment needs, Cosmos 3 comes in two main sizes. Cosmos 3 Nano is a 16B-parameter model tuned for efficient inference on workstation-grade GPUs, making it suitable for real-time physical AI robotics applications. Cosmos 3 Super, with 64B parameters, targets datacenter GPUs such as NVIDIA Hopper and Blackwell for large-scale synthetic data generation and advanced reasoning workloads. NVIDIA is open-sourcing model checkpoints on Hugging Face, along with training scripts, deployment tools, and open datasets, and is also offering Cosmos NIM microservices for optimized deployment. According to NVIDIA, "the Cosmos 3 family of open, frontier omnimodels gives developers a generational leap in ability to build robots, autonomous vehicles and vision AI that perceive, reason, plan and act in the physical world." OpenMDW-1.1 further packages code, weights, documentation, and data under a single model-centric license, easing integration into robotics development workflows.