What Bio‑Inspired Drone Design Means
Bio-inspired drone design is the practice of copying the movement, sensing, and energy habits of animals to build flying robots that match or exceed natural agility and efficiency while using far less computing power. Instead of forcing drones to depend on heavy processors and detailed 3D maps, engineers study creatures such as bees and flying squirrels to find simple rules that deliver stable, precise, and energy-efficient drones. This nature-inspired flight approach turns evolution-tested tricks into engineering principles: whole-body morphing for control, minimalist vision for guidance, and passive materials that let the air do part of the work. The goal is autonomous drone navigation that stays reliable in cluttered spaces, consumes little energy, and fits in very small airframes that can fly safely near people, crops, or machines without the bulk of conventional systems.
Bee Navigation Drones: Learning the ‘One-Flight’ Way Home
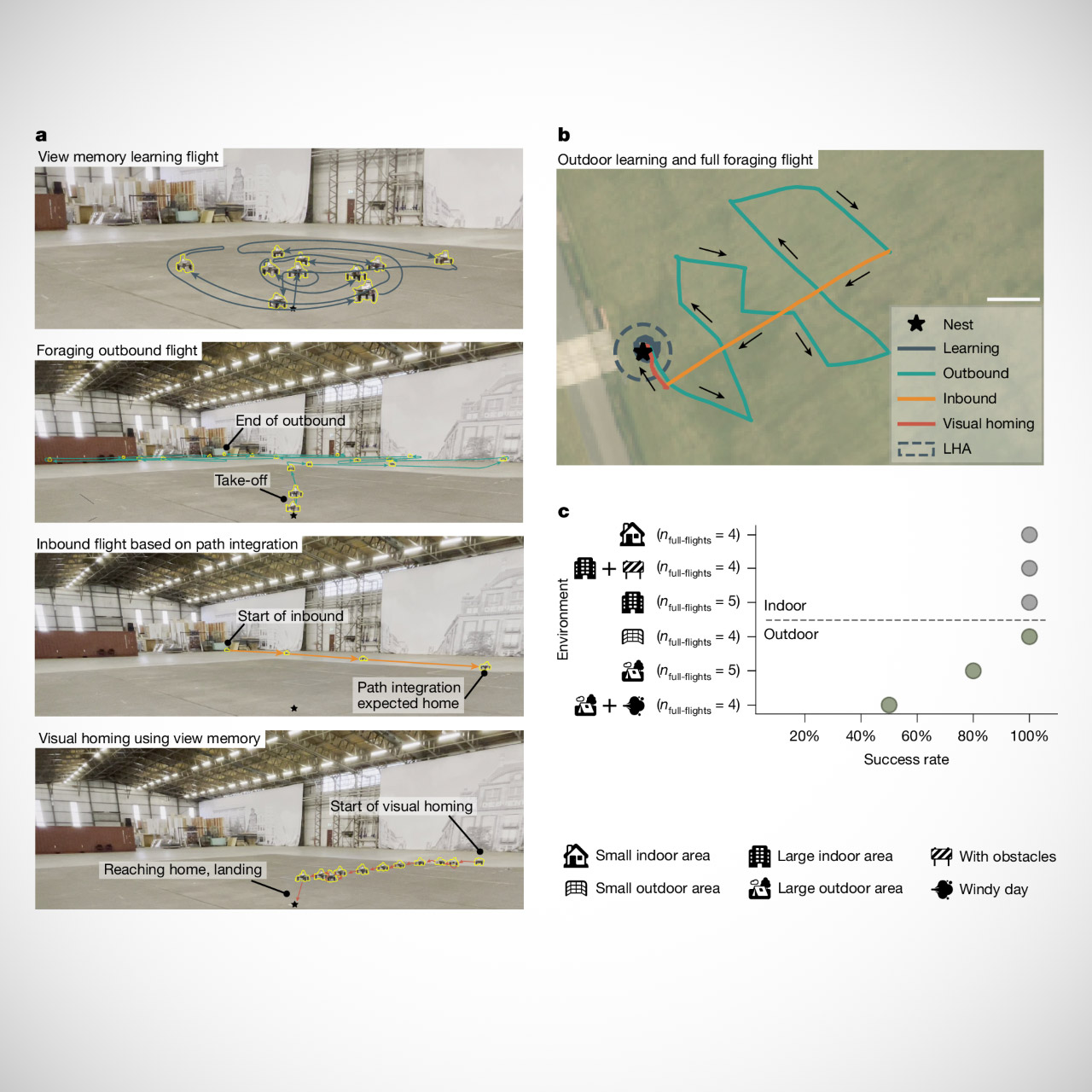
Honeybees fly long, twisted routes yet still return home with striking accuracy, guided by memory built during a short learning flight near the hive. Delft researchers translated this into bee navigation drones that conduct a quick panoramic loop around their base, storing a handful of images plus rough motion estimates instead of a heavy 3D map. The result is autonomous drone navigation that fits into a learning system using only 42 kilobytes of memory, small enough to sit where a phone app icon would live. After the learning flight, the drone relies on motion estimates to travel far away, then switches to visual memory when it re-enters the familiar zone, slowing down near home like a bee. Tests indoors and outdoors showed that this nature-inspired flight method can guide small, energy-efficient drones back over hundreds of meters without ever seeing their base during the journey.
Flying Squirrels and the Rise of Whole‑Body Morphing Drones
While bees inspire how drones find their way, flying squirrels inspire how future airframes might move through the air. Gliding mammals reshape their entire bodies in flight: stretching limbs, bending spines, deforming soft membranes and using tails to redirect airflow. Delft’s SquirrelDrone copies three of these ideas: coordinated motion of forelimbs and hindlimbs to reshape the aerodynamic body, spine and tail morphing to change wing posture, and a soft passive membrane that deforms under airflow to boost lift or drag when needed. Wind tunnel and outdoor experiments showed that this whole-body morphing improves agility, maneuverability, and stability, enabling rapid rotations, sharper turns, and steadier glides. Instead of relying on rigid wings and many moving control surfaces, the drone becomes a single morphing shape, a bio-inspired drone design that could help future aerial robots slip through forests, urban gaps, or indoor spaces with squirrel-like ease.

Less Computing, More Performance: Why Nature’s Tricks Matter
Nature-inspired flight offers a clear trade-off: complex behavior from simple rules, instead of complex code and heavy processors. Bees show that a few panoramic snapshots and motion cues can guide energy-efficient drones over long distances, avoiding the need for dense maps that demand large onboard computers. Flying squirrels show that flexible, passive structures can handle much of the fine control, so the drone’s controller issues fewer, coarser commands while the air reshapes membranes and tail surfaces automatically. Together, these bio-inspired design principles reduce computational demands and open the door to smaller, lighter aircraft with longer flight times. According to Delft University of Technology’s Micro Aerial Vehicles Lab, this approach keeps drones small enough to fly between greenhouse rows or around warehouse equipment with less risk. As engineers extend these ideas, we can expect autonomous drone navigation that is nimble, stable, and frugal with both energy and computation.