Physical AI Needs New Simulation Engines
Physical AI is the branch of artificial intelligence that trains robots, autonomous vehicles, and vision agents to understand, predict, and act within the real, physics-governed world by combining perception, reasoning, and control in unified models and simulators. This field now depends on powerful world generation AI and robotics simulation platforms to escape the slow, risky loop of real-world testing. NVIDIA’s Cosmos 3 and Genesis AI’s Genesis World 1.0 target the same bottleneck: how to train and evaluate physical AI models safely, at scale, and at lower cost. Both promise to compress development timelines for robots and autonomous vehicle training, but they approach the problem from different angles. Cosmos 3 is an open, multimodal foundation model for world modeling and action prediction, while Genesis World 1.0 is a specialized simulation stack designed to shrink robotics evaluation cycles from days to minutes.

Cosmos 3: An Open World Model for Vision, Physics, and Action
NVIDIA Cosmos 3 is pitched as an open omnimodel for physical AI that combines vision reasoning, world generation, and action prediction in a single system. Built on a mixture-of-transformers architecture, it pairs a reasoning transformer with an expert generation transformer, giving it a structured way to understand object interactions and spatial-temporal relationships before predicting video and action trajectories. According to engineering.com, Cosmos 3 is trained on billions of multimodal samples spanning text, images, video, ambient sound, and action trajectories, allowing it to power physical AI models with less data and lower training costs. Developers can treat it as a vision language model, a world model for future state prediction, or the backbone for world action models that guide robots. Product tiers like Cosmos 3 Super, Nano, and the coming Edge version target different phases, from high-accuracy simulation to real-time edge inference.
Genesis World 1.0: Simulation as Core Robotics Infrastructure
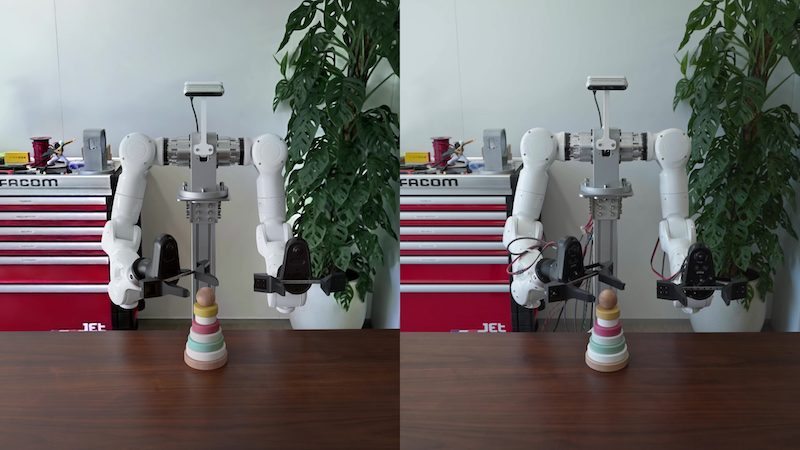
Genesis World 1.0 takes a narrower, application-first stance: it is a robotics simulation platform aimed squarely at compressing development and testing time. Genesis AI argues that simulation should be treated as infrastructure, not a side tool, because access to physical robots, operators, and lab space severely limits testing. The company says a robotics foundation model evaluation that would normally require nearly a week of continuous hardware testing can be finished in about 30 minutes using Genesis World 1.0 on GPU infrastructure. The platform blends Nyx, a photorealistic rendering engine, with a physics stack that supports rigid and deformable bodies, fluids, and complex interactions, plus Quadrants, a GPU-accelerated compiler for efficient scaling. Support for digital twins via photogrammetry lets teams reconstruct real workspaces, then run thousands of variations in lighting, object placement, and camera angles for repeatable, large-scale evaluation.

Shared Goal: Faster, Safer Training for Robots and AVs
Despite their different designs, Cosmos 3 and Genesis World 1.0 aim at the same pressure point: the need to train physical systems without relying on slow, risky real-world trials. Cosmos 3 acts as a general-purpose world generation AI and world model, predicting future states and action outcomes for robots and autonomous vehicle training. It fits into NVIDIA’s broader physical AI stack, which now includes datasets for robotics, autonomous driving, warehouse safety, and spatial reasoning, plus agent skills such as neural scene reconstruction and video augmentation. Genesis World 1.0 focuses more on evaluation cycles, claiming it can compress a 40,000-attempt object-handling test from about 166 hours of robot time to roughly 30 minutes on a GPU cluster. Genesis reports around 89 percent correlation between simulation and real-world performance, which makes its virtual tests a reliable proxy for hardware trials.

Open Models vs. Specialized Platforms in Physical AI
NVIDIA and Genesis AI outline two complementary paths for democratizing physical AI development. Cosmos 3 is an open model that developers can adapt across robots, autonomous vehicles, and vision agents, backed by the Cosmos Coalition, where world model builders and AI developers share models, tools, and evaluation methods. This openness aims to create a common foundation for physical AI models that can generalize with less training data and more interoperable world modeling tools. Genesis World 1.0, in contrast, is a specialized robotics simulation platform that treats high-fidelity virtual environments as the main engine for experimentation, evaluation, and future reinforcement learning. For teams building a robotics simulation platform today, the choice is not necessarily either-or: Cosmos 3 can supply world generation and action prediction, while Genesis World 1.0 can provide dense, controlled testing, together pushing physical AI systems from lab prototypes to deployable machines.