From mechanical limits to a robotics software bottleneck
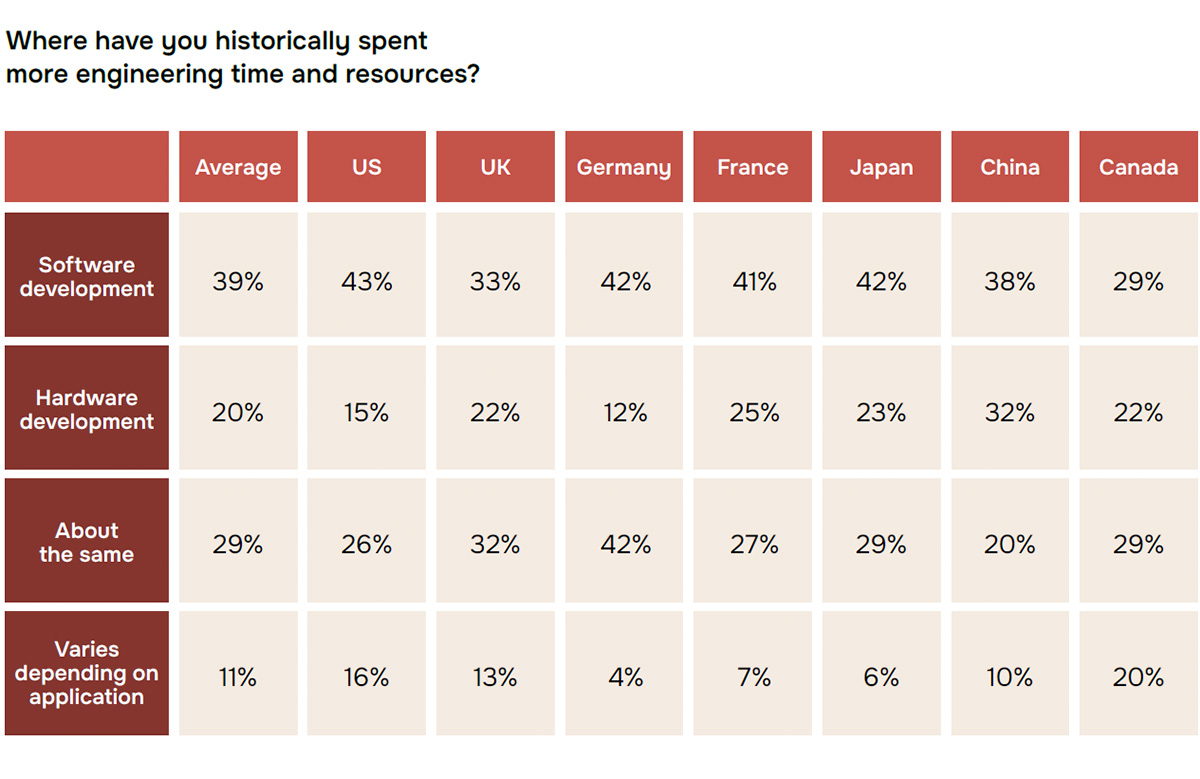
The robotics software bottleneck is the growing gap between advanced hardware capabilities and the ability of software architectures, tools, and security models to control complex, AI-enabled robots safely at scale. New research from QNX, based on a survey of 1,000 robotics developers, shows this gap has become the main drag on physical AI development. Almost one in three respondents named software architecture and integration as their biggest performance bottleneck, compared with 16% who blamed hardware. That finding marks a clear shift from an era when sensor quality, actuator power, and compute boards defined what robots could do. As physical AI systems move from labs and cages into hospitals, warehouses, and streets, the limit is less about motors or processors and more about predictable, deterministic software that can coordinate mixed-criticality workloads without failing in the real world.
Physical AI escapes the lab, raising the bar for software
Physical AI development is pushing robots from controlled test cells into dynamic, unconstrained environments. According to QNX, more than four in five respondents say their systems are already deployed alongside humans, and among the rest, two-thirds expect to reach human environments within three to five years. That shift replaces fixed, repeatable workflows with open-ended interaction, where people, machines, and AI decisions intersect in real time. Nearly all developers surveyed—95%—say deterministic, real-time execution is important to the systems they build, but most still depend on general-purpose operating systems for at least part of their workloads. This mismatch between requirements and foundations is where safety, latency, and reliability issues emerge. Robots that share space with surgeons or shop-floor workers must not only perceive and plan; they must also meet strict timing guarantees and safety standards every time they move.

Why robotics architecture, not chips, now sets the pace
The study paints a picture of robotics architecture under strain. QNX executives describe teams running into “the very real limits of architectures that were never designed for this level of complexity or accountability.” Developers consistently report four intertwined challenges: integration complexity, certification delays, functional safety risks in human–machine interaction, and the need to ensure predictable behavior under load. These issues emerge because modern robots combine AI-driven perception, high-level planning, real-time control loops, and connectivity into one distributed system. Hardware advances have delivered affordable compute and sensors, but orchestrating them safely has become the hard part. As systems juggle mixed levels of criticality—combining life-critical functions with non-critical analytics—traditional monolithic stacks and general-purpose platforms struggle. The industry is being forced toward modular, safety-certified foundations that can isolate risks while still supporting rapid iteration.

Security and real-time control as new core infrastructure
As robots gain autonomy and connectivity, software security robotics requirements are converging with real-time control needs. The QNX report notes that 85% of developers expect software to play an even greater role in robotics over the next three to five years. Teams anticipate their biggest investments will be AI-driven decision making and cybersecurity, both at 51%, followed by operating systems and real-time control software at 37%. This spending pattern shows that software foundations—secure, certifiable kernels, deterministic schedulers, and hardened middleware—are becoming strategic assets. Yet 91% of respondents still run at least some safety-related workloads on general-purpose operating systems, even though safety-certified commercial solutions are rated as the best fit for their needs. The tension between flexibility and assurance is forcing teams to reconsider how they partition functions, validate code, and design for both security and uptime from the start.
Building the software stack for the next robotics wave
The data suggests robotics development is entering a software-centric phase that will reshape how teams plan, build, and operate physical AI systems. Integration platforms, real-time operating systems, and safety-certified components are not add-ons but the baseline for scaling fleets of autonomous machines. Stronger software foundations could also shorten certification timelines by giving regulators clearer, more predictable behavior to assess. QNX argues that by focusing on these foundations, developers can set the stage for “a new generation of safe, reliable, and highly autonomous robots.” For industry leaders, the message is clear: future breakthroughs depend less on exotic hardware and more on modernizing codebases, adopting modular architectures, and treating security and deterministic behavior as architectural constraints. The robotics software bottleneck is now the main obstacle—and the biggest opportunity—for the next wave of physical AI development.