From Mechanical Marvels to Software Bottlenecks
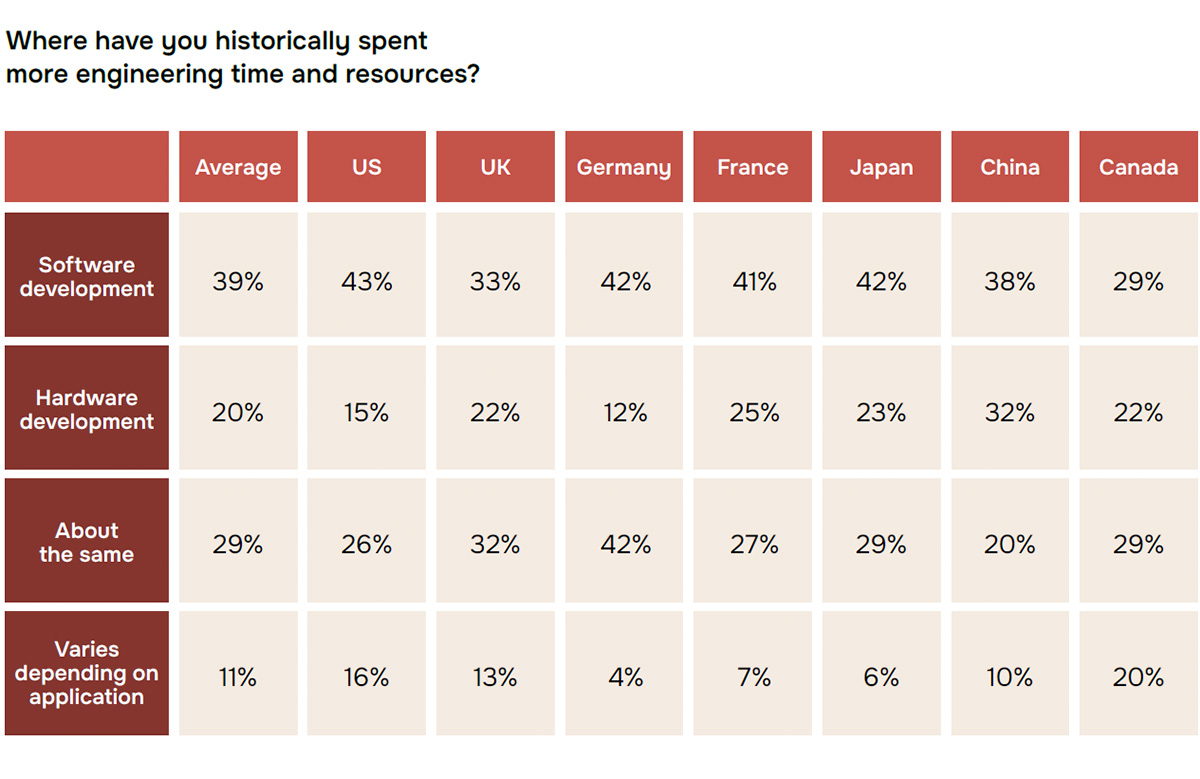
Software in robotics now refers to the full stack of operating systems, AI models, control logic, and security layers that allow physical machines to sense, decide, and act safely in unpredictable environments, and this stack has become the main constraint on how far and how fast physical AI can advance. BlackBerry QNX’s “Inside the Robot: Architecture Benchmark Report” highlights this shift clearly: almost one in three developers (27 percent) name software architecture and integration as their biggest performance bottleneck, compared with 16 percent who point to hardware. As robots move off tightly scripted production lines and into hospitals, streets, and shared warehouses, their behavior depends less on motors and metal and more on code, timing, and isolation. The result is a new class of robotics software challenges where integration complexity, certification delays, and safety demands now dominate project risk and timelines.
Why Unconstrained Environments Expose Robotics Software Challenges
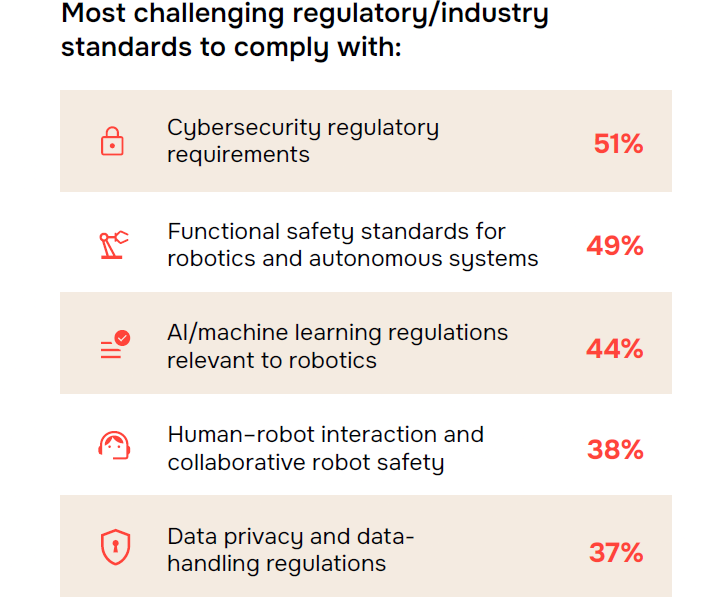
Early industrial robots worked inside cages or fixed lanes, with limited tasks and predictable inputs. Today’s physical AI systems drive in traffic, work beside technicians, or share aisles with human pickers. According to BlackBerry QNX, more than four in five developers (83 percent) say their systems are already deployed alongside humans, with many of the remainder expecting that within a few years. That shift from controlled to dynamic environments multiplies edge cases and forces software to juggle mixed levels of criticality: safety functions, AI-driven decision making, and cloud connectivity all share the same robot security architecture. Developers cite four main obstacles here: integration complexity between modules, delays in safety certification, functional safety risks during human–machine interaction, and difficulty ensuring predictable behavior when it matters most. These pressures turn software from an afterthought into the central AI robotics bottleneck.

Security, Safety, and the New Robot Architecture
As deployments move into hospitals, retail floors, and public spaces, security and safety become architectural concerns rather than add-ons. QNX’s survey shows teams expect their biggest investments to be in AI-driven decision making and cybersecurity, both at 51 percent, followed by operating systems and real-time control software at 37 percent. This mirrors a broader recognition that robot security architecture must support isolation between critical and non-critical processes, trustworthy updates, and strong defaults for networking and data access. Traditional monolithic designs struggle to meet these expectations while staying certifiable. Instead, developers are turning toward microkernel-style operating systems, mixed-criticality scheduling, and fine-grained sandboxing to keep agentic AI components from interfering with motion control or safety logic. The aim is not only to prevent attacks, but also to guarantee predictable response when perception is uncertain and humans are nearby.
Agentic AI Sandboxing and the Role of Developer Experience
The rise of agentic AI—systems that can plan, call tools, and act autonomously—adds another layer of complexity. Every new tool, SDK, and accelerator increases the risk of dependency clashes and subtle security gaps if the environment is hand-built on each workstation. Canonical’s Workshop tackles this by defining whole development and runtime environments in simple YAML files that are treated as code. With a single command, these files reproduce the same environment on any compatible machine, from a laptop to a build server. Workshop configurations can pull in ML and hardware stacks such as NVIDIA CUDA, AMD ROCm, Ollama, or OpenCode, while treating hardware passthrough as a first-class configuration object. This declarative model standardises and sandboxes agentic tooling across teams, reduces onboarding time, and keeps the configuration stable even as host operating systems change—an important foundation for safer AI robotics sandboxing.
Fixing the AI Robotics Bottleneck: Architectural Priorities
The research and tooling trends point to a common prescription: treat software foundations as strategic infrastructure, not incidental glue. For robotics leaders, that means prioritising predictable real-time behavior, clear separation between safety-critical and experimental components, and repeatable environments across development and deployment. Agentic AI sandboxing should be designed in from the start so that decision-making modules and data-hungry perception pipelines cannot compromise motion control or safety processes. Declarative tools such as Canonical Workshop show how standardisation can cut friction and reduce integration errors, while platforms like QNX emphasise certified real-time kernels and mixed-criticality support. Together, these approaches suggest a path where robots can evolve quickly at the software layer without compromising reliability. As robots enter more unconstrained environments, the teams that master architecture, security, and developer experience will move faster than those relying on hardware upgrades alone.