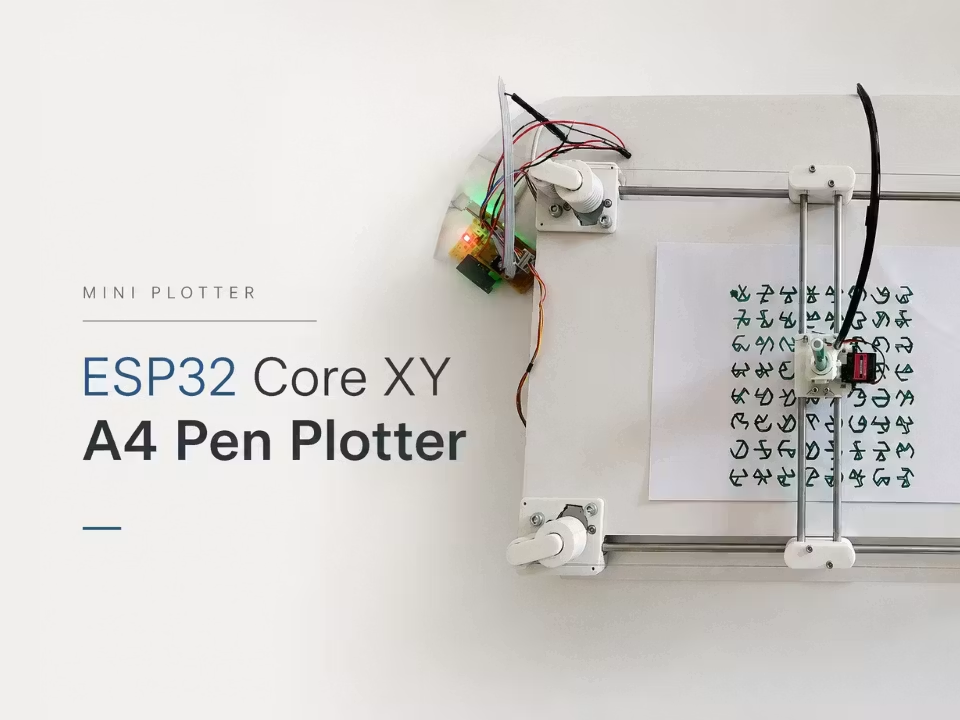
Why Choose a CoreXY ESP32 Pen Plotter in A4 Size?
A CoreXY mechanism is ideal when you want precise motion control in a compact A4 footprint. Instead of dedicating one motor per axis in a traditional Cartesian layout, CoreXY couples two motors to a crossed-belt system, allowing the pen carriage to move in X and Y with shorter belt paths and a smaller frame. The result is a lighter moving mass and better positioning repeatability—perfect for detailed plots on A4 paper. Pairing this with an ESP32 transforms the machine into a self-contained, Wi‑Fi-enabled plotter. The microcontroller can host a web interface, accept SVG-derived G-code, and execute motion without a tethered computer, making it a compelling DIY motion control project. For home workshops and maker spaces, this combination delivers a portable, desktop-sized machine that demonstrates professional-grade integration of mechanics, electronics, and firmware on a single microcontroller platform.
Designing the CoreXY Mechanics and A4 Drawing Envelope
Start by defining your usable A4 drawing area—roughly 210 × 297 mm—and then add clearance for margins, homing, and belt routing. In a CoreXY mechanism, both motors are fixed to the frame, driving a continuous GT2 belt that wraps around idlers and attaches to the pen carriage. The motion in X or Y is generated by coordinated rotation of the two motors, so maintain symmetrical belt paths to minimize backlash and skew. A fully 3D-printed frame, inspired by compact desktop plotters, keeps the build accessible to any fab lab or makerspace. Use smooth steel rods or linear rails for the guide axes, and design printed bearing blocks, belt clamps, and tensioners into the structure. Focus on rigidity where the frame ties together and low mass for the moving carriage to reduce the load on small stepper motors. Integrating the pen holder with a simple Z-lift servo completes the three-axis motion system in a slim, portable format.
Integrating ESP32 Electronics and a CoreXY-Friendly PCB
To keep the ESP32 pen plotter truly compact, design a single PCB that carries the microcontroller, stepper drivers, servo header, and power distribution. An ESP32 module becomes the brain, providing both Wi‑Fi connectivity and real-time control signals. Each stepper motor connects through a driver stage such as a ULN2803 Darlington array, which safely translates 3.3 V GPIO logic into the higher-current coil drive needed for small geared steppers operating at 5 V. Route four GPIO lines to each CoreXY motor and a dedicated PWM-capable pin to the SG90 (or similar) pen-lift servo. Careful PCB layout ensures short, clean signal paths and clear separation between logic and motor power. By embedding everything on a single board, you eliminate external control shields and messy wiring looms, making the plotter easier to assemble, debug, and transport. This integrated electronics approach underlines how advanced motion control can be achieved with a minimal hardware footprint.
Writing Custom ESP32 Firmware for CoreXY Motion
A custom firmware project lets you exploit the ESP32’s dual-core architecture to separate networking from time-critical motion tasks. On startup, the firmware configures the chip as a Wi‑Fi access point and launches an HTTP server that hosts a browser-based interface. Users connect from a phone or laptop, upload an SVG, and let client-side JavaScript convert paths to G-code before sending them back to the plotter. On the control side, the firmware parses G-code commands such as G0 and G1 for rapid and linear moves, plus M-codes to raise or lower the pen via the servo. CoreXY motion requires transforming target X–Y coordinates into coordinated step counts for both motors, so the firmware must compute these deltas and issue synchronized step sequences. Implementing a buffered G-code queue and trapezoidal acceleration helps maintain smooth, stall-free movement, even with small geared steppers, demonstrating robust DIY motion control on a microcontroller.
Tuning, Homing, and Bringing the Plotter to Life
Once mechanics and firmware are in place, careful tuning turns a functioning ESP32 pen plotter into a precise drawing tool. Begin with homing: add endstops or define a repeatable mechanical origin and implement a G28 routine that gently moves the carriage to this reference point. This guarantees consistent coordinates across plotting sessions. Next, calibrate steps-per-millimeter for both CoreXY motors by drawing test patterns and measuring deviations. Fine-tune belt tension to remove backlash without overloading bearings. With acceleration and maximum velocity set conservatively, gradually increase speeds while monitoring for missed steps or resonance. The web interface workflow—power on, connect, upload, draw—lets you test iterations rapidly. When properly tuned, the compact A4 plotter produces clean, repeatable lines, serving as a portable showcase of integrated mechanics, custom firmware, and wireless control that any maker can replicate and extend.

