A New Pathway to Accessible Humanoid Robotics
Humanoid robots have traditionally demanded bespoke machining, high tooling costs, and institutional budgets, putting serious experimentation beyond the reach of most developers. Menlo Research’s Asimov humanoid robot kit is part of a new wave of 3D printed robotics platforms that flip this equation. Standing 1.2 meters tall and weighing 35 kilograms, Asimov is built around structural parts produced with Multi Jet Fusion printing, a process that delivers strong, lightweight components without the expensive tooling of CNC machining. By embracing additive manufacturing, the team has lowered per-unit costs and made it far easier to replace or reconfigure parts. The result is a humanoid robot kit that targets hobbyists, researchers, and independent robotics developers who want a credible, full-body testbed without proprietary hardware constraints, opening a practical on-ramp to open source robotics experimentation.
Modular Design and Open Source Robotics for Faster Iteration
At the heart of Asimov is a modular architecture explicitly designed for iteration. Its universal motor mounting system lets the legs, arms, torso, and head function as discrete, swappable modules. Developers can test new actuators, alter limb configurations, or upgrade specific subsystems without tearing down the entire assembly. Mechanically, the platform includes more than 25 degrees of freedom and an ankle joint based on a parallel Revolute-Spherical-Universal mechanism, enabling roll and pitch with improved torque distribution for uneven terrain. On the software side, a Processor-in-the-Loop simulation framework injects realistic signal degradation into control testing, narrowing the gap between simulation and real-world behavior. Menlo Research publishes a complete bill of materials on GitHub, allowing builders to source their own components and 3D print replacement parts, strengthening the ecosystem around open source robotics and community-driven improvement.
Unassembled Kits, Lower Footprints, and Hands-On Learning
Unlike traditional turnkey robots, the Asimov platform ships as a fully unassembled humanoid robot kit. This format offers practical and educational advantages. Shipping flat-packed parts instead of a built-up body reduces volume, cutting transport costs and associated environmental impact. For builders, assembly becomes part of the learning curve: understanding how each Multi Jet Fusion printing-based component integrates with motors, sensors, and controllers deepens insight into the robot’s kinematics and failure modes. The unassembled approach also makes it easier to introduce incremental design changes without reconfiguring factory-level assembly lines. For educators and research labs, this translates into a repeatable, hands-on curriculum: students can construct, debug, and modify the same 3D printed robotics platform, reinforcing skills in mechanical integration, wiring, and software deployment while working on a real, human-scale system.
Additive Manufacturing and Automated Post-Processing as a Complete Pipeline
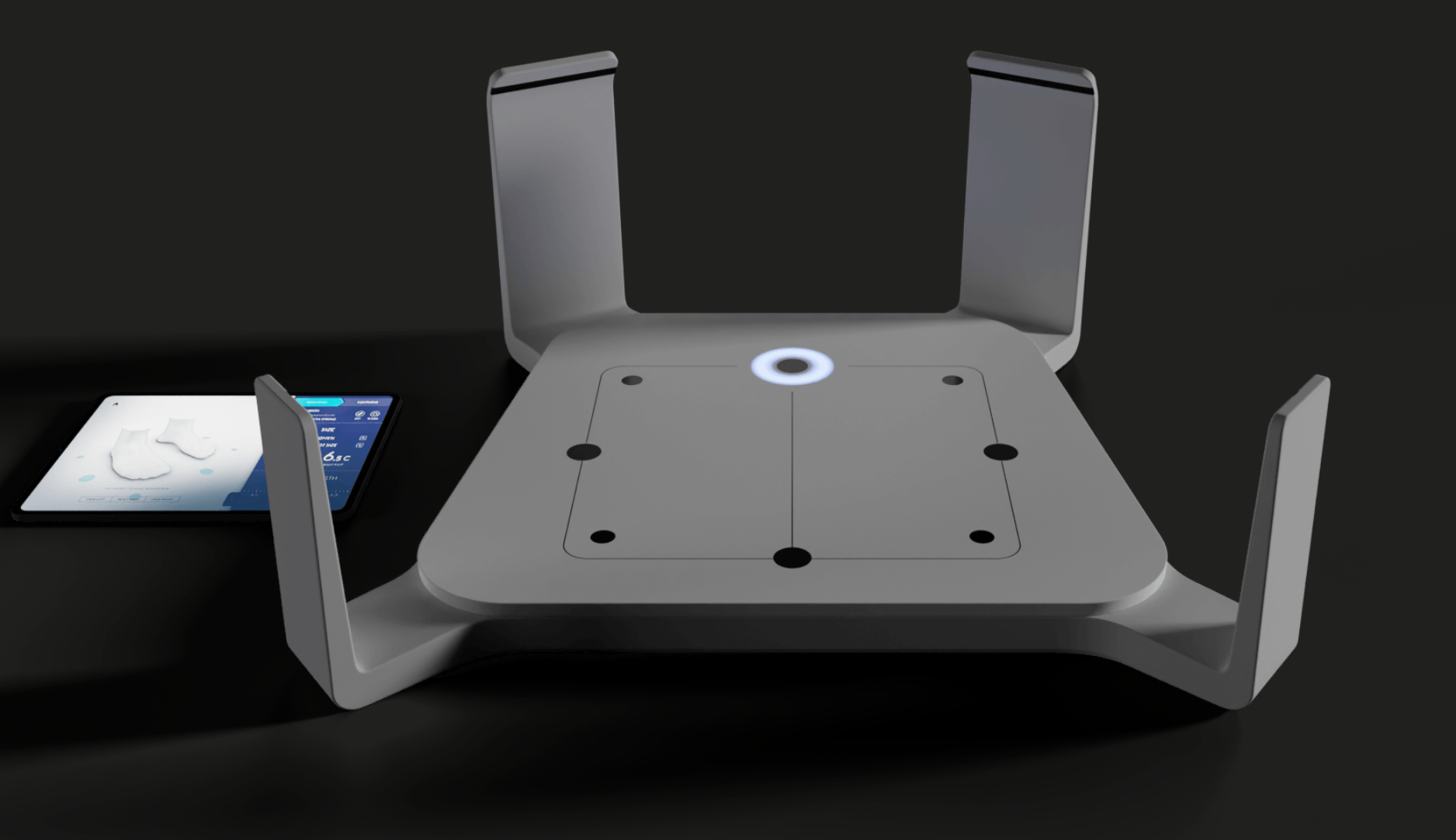
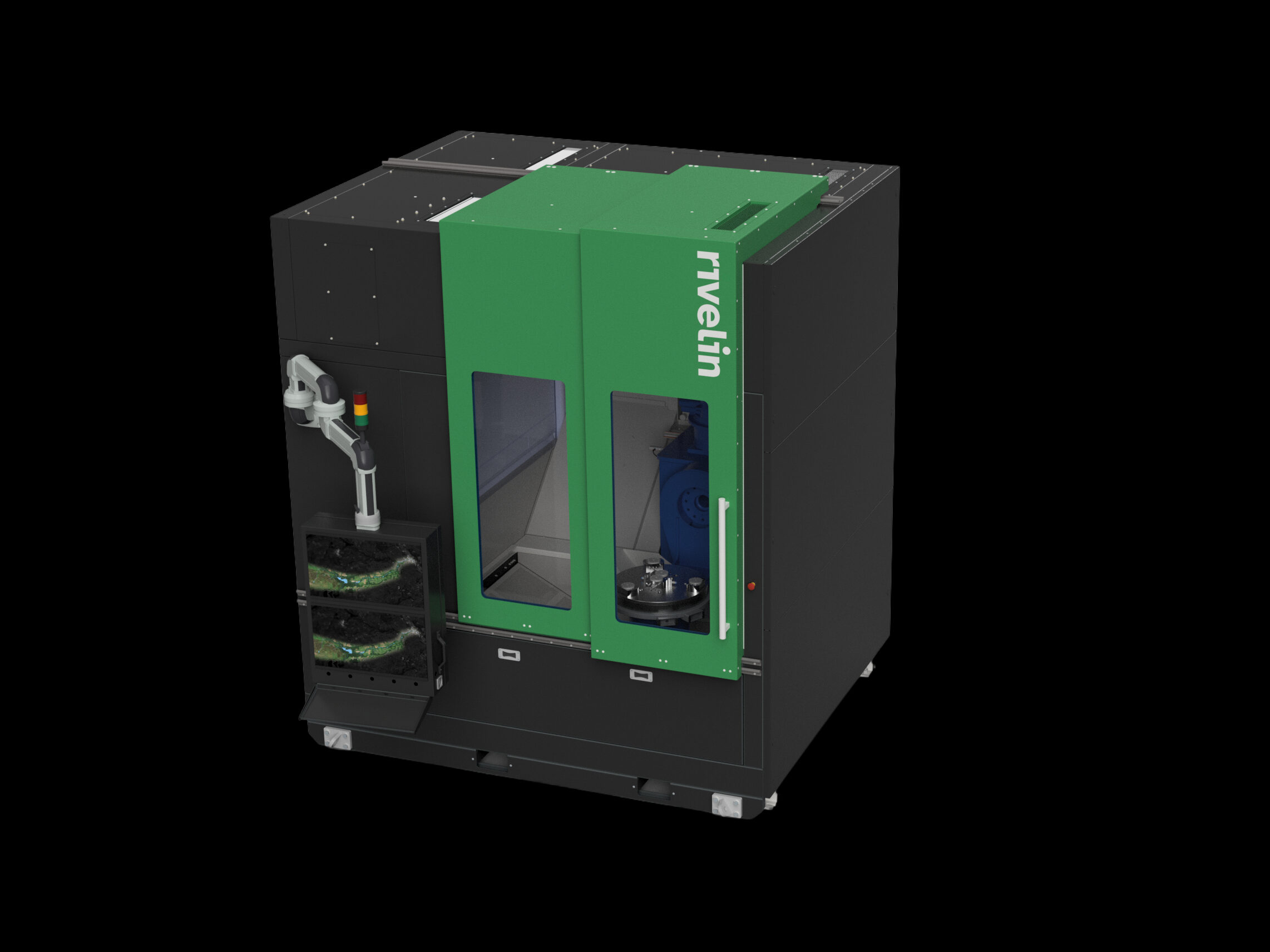
Asimov’s reliance on Multi Jet Fusion printing highlights how additive manufacturing can support complex, structural robotic assemblies. However, printed parts usually require extensive finishing to remove residual material and tune surface quality. This is where emerging automated post-processing systems, such as those developed by Rivelin Robotics, become strategically important. Their robotic cells, driven by proprietary control software, handle deburring, support removal, and surface refinement for metal, polymer, and ceramic components with greater consistency than manual work. Integrating such automation with additive production closes a key gap in the 3D printed robotics pipeline: designers can iterate quickly, print structural components for humanoids, and rely on robots to deliver production-ready finishes at scale. For developers of open source robotics platforms, this convergence promises shorter lead times, more predictable quality, and a clearer path from prototype to deployable humanoid systems.