What Cosmos 3 Is and Why Physical AI Needs It
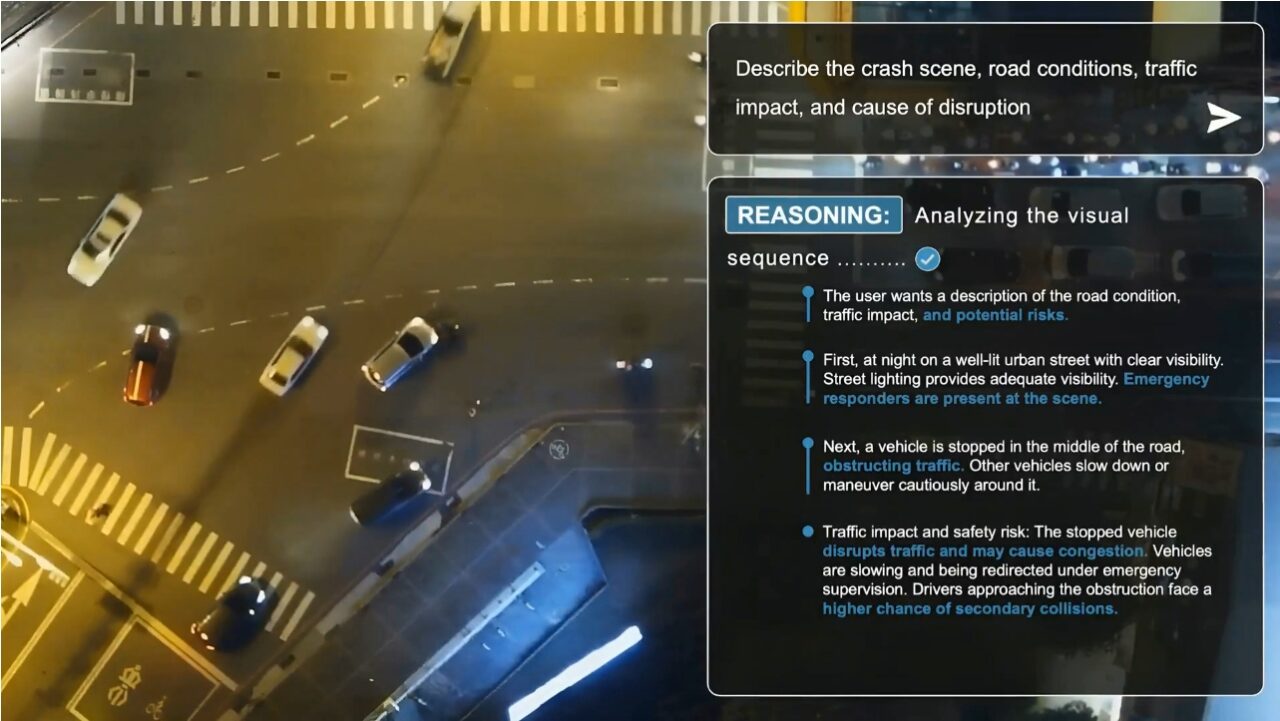
NVIDIA Cosmos 3 is an open foundation model for physical AI that lets robots, autonomous vehicles, and vision agents understand scenes, predict how the world will change, and generate actions in a single unified system. Instead of treating robot vision systems, planning engines, and control logic as separate stacks, Cosmos 3 offers one omnimodel that natively works across text, images, video, ambient sound, and action trajectories. NVIDIA describes it as a model that “powers perception, prediction and action,” aimed at real machines operating in dynamic environments rather than chatbot-style assistants. For teams building autonomous vehicle AI or industrial robots, this means a common model that can watch a scene, infer what objects are doing, and decide what should happen next. In short, Cosmos 3 is designed to help physical AI systems understand what is happening before they move.
Mixture-of-Transformers: A New Architecture for World Modeling AI
At the core of Cosmos 3 is a mixture-of-transformers architecture that targets the specific demands of physical AI models. Instead of one monolithic network, Cosmos 3 pairs a reasoning transformer with an expert generation transformer. The reasoning component focuses on interpreting object interactions, motion patterns, and spatio‑temporal relationships in complex scenes. Once it forms this internal understanding, the expert generator predicts future video frames and action trajectories that are consistent with physics. This design makes Cosmos 3 a capable world modeling AI system: it can simulate how an environment is likely to evolve, rather than only labeling images or describing frames. According to NVIDIA, the model is trained on billions of multimodal samples spanning text, images, video, sound, and actions, which gives developers a powerful starting point for building physical AI systems with less task‑specific data and shorter training cycles.

From Scene Reasoning to Action Generation in Robots and AVs
Cosmos 3’s main promise is that scene reasoning, action generation, and world modeling live inside one foundation model instead of three separate tools. For robot vision systems, Cosmos 3 can act as a vision‑language model that not only recognizes objects but also interprets how they move and interact over time. The same internal understanding can then drive action policies, turning perception into motor commands for arms, mobile robots, or autonomous vehicle AI stacks. NVIDIA positions Cosmos 3 as a backbone for world action models, helping engineers train robots to perform specific tasks using synthetic trajectories generated by the model. Because it can simulate future world states, developers can test how a robot might respond to edge cases—such as moving obstacles or occluded objects—before deploying policies on physical hardware, improving safety and reliability in real‑world settings.
Open Model, OpenMDW, and the Cosmos Coalition
Cosmos 3 is explicitly released as an open foundation model for physical AI, with packaging designed to fit real engineering workflows. Through the OpenMDW-1.1 framework, developers get a single model‑centric license that lets them train, modify, contribute, redistribute, and deploy weights, architecture, code, documentation, datasets, and benchmarks under one legal structure. This makes it easier to integrate Cosmos 3 into existing robotics and autonomous vehicle AI stacks without juggling separate licenses. NVIDIA is also building an ecosystem around the model via the NVIDIA Cosmos Coalition, which includes Agile Robots, Black Forest Labs, Generalist, LTX, Runway and Skild AI, all working on next‑generation world models. For robotics teams, this combination of open access, common tooling, and community support lowers the barrier to adopting foundation models for robotics and accelerates experimentation across different physical AI applications.
What Cosmos 3 Changes for Developers of Physical AI Models
For developers, the significance of Cosmos 3 is less about a single benchmark score and more about a new development pattern for physical AI models. Cosmos 3 can be used as a vision‑language front end, a world modeling AI simulator, or the backbone for task‑specific action policies, all starting from the same pretrained foundation. This reduces the fragmentation between perception, prediction, and control, and shortens the time from prototype to deployment. Training and evaluation cycles that once depended on separate simulators, custom synthetic data pipelines, and narrow policy networks can now be built around one open world model. In practical terms, teams working on robots, autonomous vehicles, or large‑scale robot vision systems can experiment faster, share common model components, and focus effort on fine‑tuning behaviors for their environments instead of re‑implementing the entire stack from scratch.