From Physical AI Promise to Software Bottleneck
The main topic is the growing gap between rapid advances in physical AI hardware and the slower progress of robotics software, which has become the primary bottleneck limiting innovation, safety, and large‑scale deployment of autonomous machines in everyday environments. QNX’s “Inside the Robot: Architecture Benchmark Report,” based on a survey of 1,000 robotics developers, shows how robotics software challenges now dominate project risk and delivery timelines. Almost one in three respondents (27%) name software architecture and integration as their biggest performance bottleneck, compared with 16% who point to hardware. This shift shows that more powerful chips, sensors, and actuators are no longer enough; the harder problems live in code. As physical AI development accelerates, developers must solve issues of predictability, real-time behavior, and mixed‑criticality workloads before advanced robots can leave labs and pilot projects and operate at scale.

Robots in Human Spaces Raise the Stakes for Software
As robots move from fenced-off cells into hospitals, city streets, and shared factory floors, software and security priorities are rising quickly. QNX reports that 83% of surveyed teams already deploy systems alongside people, and many of the rest expect to do so within three to five years. In these unconstrained environments, deterministic, real-time execution is nearly universal as a requirement, with 95% of respondents calling it important to their systems. Yet 91% still run at least part of their workloads on general‑purpose operating systems that were not designed for safety‑critical or hard real‑time use. That mismatch creates acute robotics software challenges: unpredictable latency, difficulty isolating safety functions, and complex certification paths. Physical AI development now hinges on moving from flexible but fragile stacks to architectures that can guarantee behavior when a robot is inches from a human instead of meters behind a cage.

Performance, Security, and Scalability Slow Physical AI
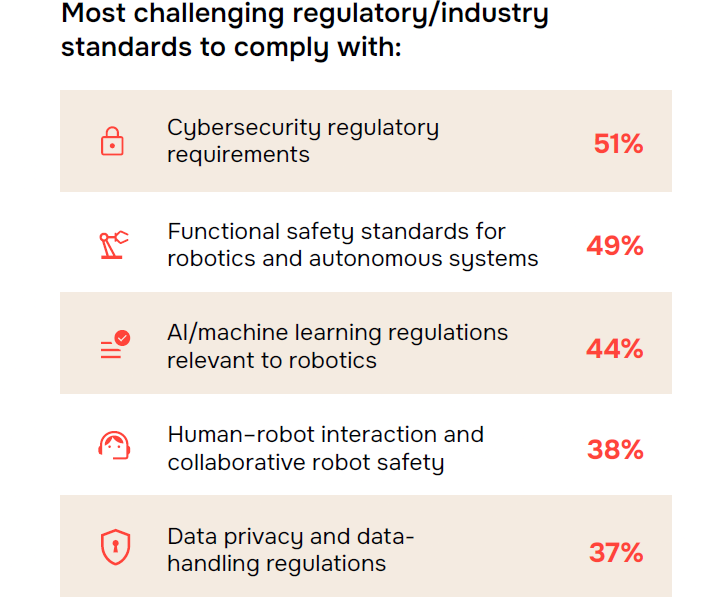
The QNX research shows how performance, security, and scalability are now intertwined obstacles to physical AI. Developers highlight four persistent issues: integration complexity across heterogeneous components, certification delays, functional safety risks in human‑machine interaction, and ensuring predictable behavior under stress. Cybersecurity and functional safety standards are among the hardest hurdles, cited by around half of respondents. As more robots connect to networks and cloud services, concerns about robot security scalability grow: systems must withstand remote attacks while still meeting strict real‑time and safety targets. At the same time, teams expect software’s role to increase, with 85% planning heavier investment in AI‑driven decision making and cybersecurity, followed by operating systems and real‑time control software. These priorities underline that the main software bottleneck to innovation is no longer writing algorithms, but building secure, certifiable architectures that can scale from one prototype to thousands of autonomous units.
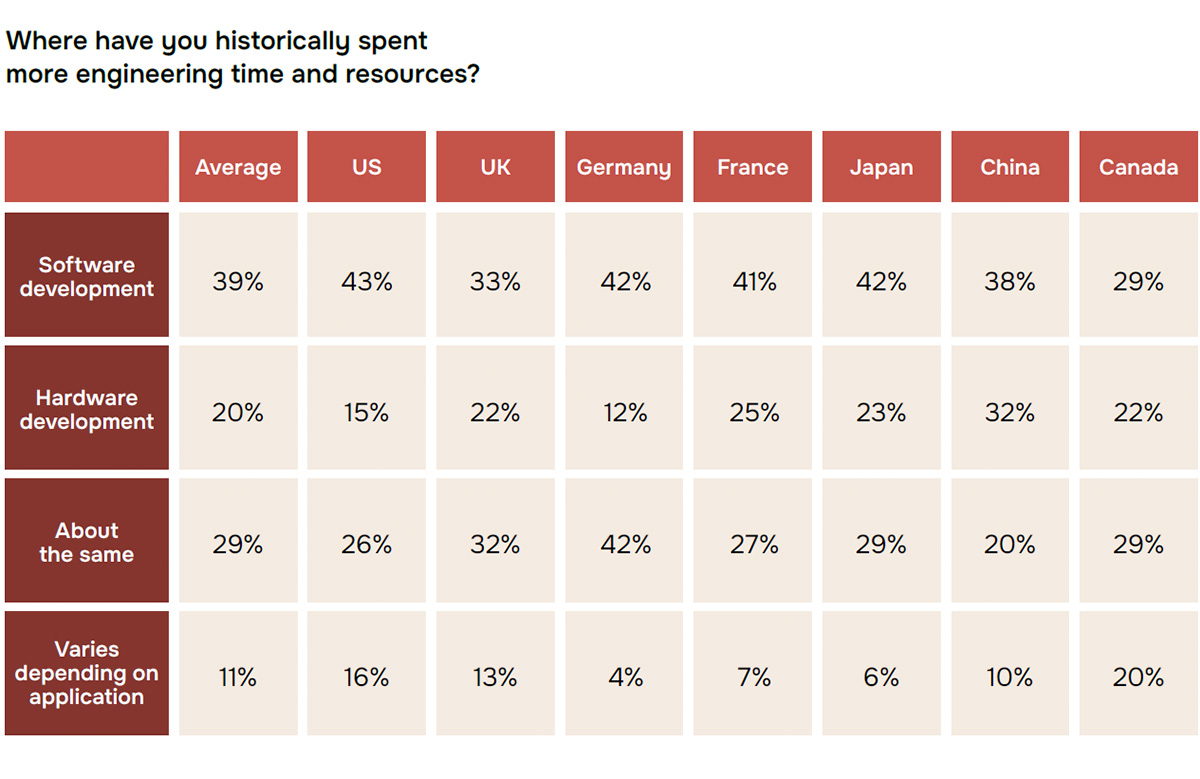
From Hardware Arms Race to Software Foundations
For years, robotics roadmaps focused on better sensors, cheaper actuators, and more powerful processors. The new QNX study indicates that phase is ending, as software development now consumes more developer resources than hardware. According to QNX, future progress depends less on hardware gains and more on reliable software foundations that support mixed‑criticality workloads and guaranteed behavior. Industry leaders echo this shift: “Developers consistently cite four core challenges: integration complexity, certification delays, functional safety risks in human-machine interaction, and ensuring predictable behavior when it matters most,” said Jim Hirsch of QNX. To break the software bottleneck to innovation, teams are rethinking operating systems, partitioning safety and non‑safety code, and investing in real-time kernels designed for certification. The emerging consensus is clear: without a stronger base of operating systems, middleware, and security frameworks, the next wave of physical AI will stall at pilot scale.