From Metal to Code: Redefining the Robotics Bottleneck
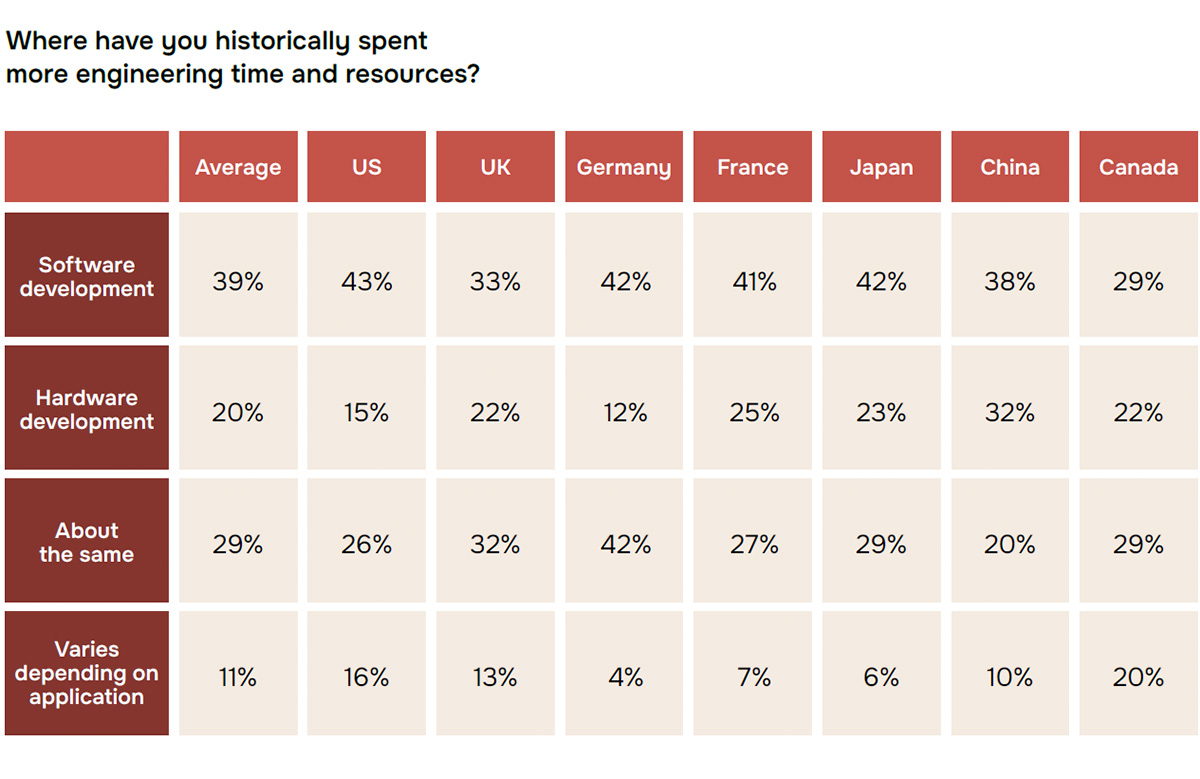
Robotics software development refers to the design, integration, and deployment of operating systems, middleware, control algorithms, and AI that allow robots to make decisions, move safely, and interact predictably with people and other machines across diverse physical environments. That definition matters now because QNX’s new “Inside the Robot: Architecture Benchmark Report” shows a decisive shift in where robotics teams are getting stuck. Hardware is no longer the main brake on progress: almost one in three developers (27%) now identify software architecture and integration as their biggest performance bottleneck, compared with 16% who point to hardware. As robots move from fenced‑off cells to city streets, surgical suites, and busy shop floors, the limiting factor is less about motors and sensors and more about whether the underlying code can deliver predictable, safe behavior in complex, unconstrained settings.
Physical AI Meets Real‑World Constraints
The QNX research frames this shift as a direct consequence of physical AI innovation: robots are becoming more intelligent, autonomous, and tightly integrated into everyday workflows. According to QNX, 83% of surveyed robotics teams already deploy systems alongside humans, and two‑thirds of those not doing so expect to within three to five years. This proximity raises the stakes for software reliability, deterministic timing, and fail‑safe behavior. Jim Hirsch of QNX notes that developers face “integration complexity, certification delays, functional safety risks in human‑machine interaction, and ensuring predictable behavior when it matters most.” These are software problems before they are mechanical ones. As AI inference accelerators and advanced sensors improve, they expose gaps in middleware, messaging, and scheduling layers that were never designed for such high data rates or mixed‑critical workloads.

Performance, Security, and Scalability: The New Architecture Checklist
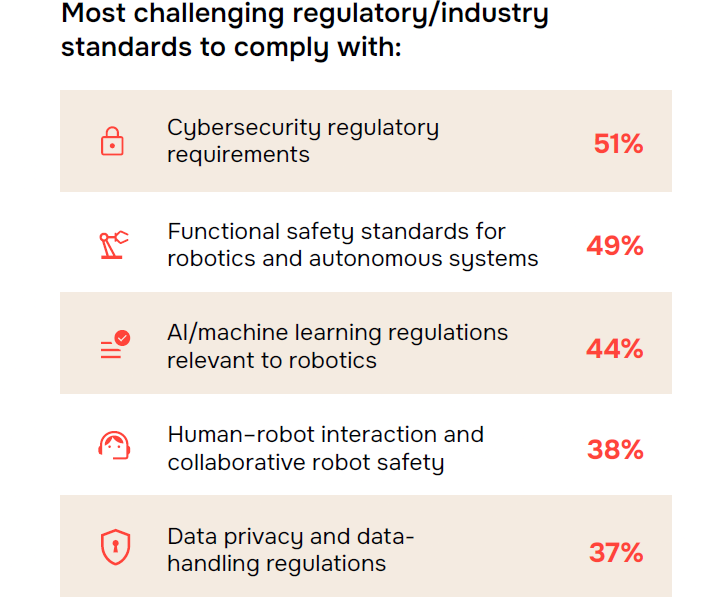
The study makes clear that robotics performance challenges cannot be solved by faster chips alone. Developers say future progress depends on software architecture for robotics that can coordinate mixed safety levels, manage real‑time control, and maintain predictable execution under load. Nearly all respondents highlight deterministic, real‑time execution as important, yet 91% still run at least some safety‑critical workloads on general‑purpose operating systems. That gap helps explain why 86% of those teams are open to switching OS platforms. Investment priorities are moving the same way: 51% of respondents expect to put their biggest future spend into AI‑driven decision making and another 51% into cybersecurity, with 37% focused on operating systems and real‑time control software. Robot security scalability now sits alongside latency and uptime as a first‑order design concern, not an afterthought.
What Robotics Developers Need to Do Differently
For developers, the message is that software foundations are becoming strategic assets, not interchangeable components. Teams building physical AI systems need architectures that separate safety‑critical tasks from non‑critical services, while still allowing scalable updates and fleet‑level management. That means scrutinizing OS choices, middleware, and communication patterns as carefully as sensor stacks. It also means treating cybersecurity as part of functional safety, given how connected robots now are. As QNX’s report shows, the community is aware of the problem: 85% of developers expect software to play an even greater role in robotics over the next three to five years. To keep pace, organizations will have to modernize their toolchains, adopt software platforms designed for deterministic behavior, and build security and certification thinking into their development lifecycle from the start.