Software Becomes the New Robotics Bottleneck
The robotics software bottleneck is the growing gap between advanced hardware capabilities and the software architectures, security, and real-time control needed to safely deploy physical AI in unconstrained, human environments. New research from QNX, based on 1,000 robotics developers, shows this gap is now the main limit on robotics and physical AI innovation. Almost one in three respondents, or 27%, named software architecture and integration as their biggest performance bottleneck, while only 16% pointed to hardware. This marks a shift: motors, sensors, and compute are no longer the main constraint, but the code that binds them together is. As robots leave controlled test sites for hospitals, factories, and streets, developers say predictable, secure, and scalable software foundations will decide whether AI-enabled machines remain prototypes or become everyday tools.
From Controlled Labs to Human Environments
Physical AI innovation is shifting robots from tightly controlled cells into messy, unpredictable spaces shared with people. QNX reports that 83% of surveyed systems are already deployed alongside humans, and among the rest, two-thirds expect to be within three to five years. This exposure raises the stakes for safety, reliability, and deterministic behavior. Nearly all respondents, 95%, say deterministic, real-time execution is important for the systems they build. Yet 91% still run at least some safety-critical workloads on general-purpose operating systems that were not designed for real-time or safety-critical use. This tension between flexibility and predictability is becoming a central robotics developer challenge: teams want rapid iteration and rich AI stacks, but they also need hard guarantees about how software behaves when a robot moves through a crowded shop floor or a surgical suite.

Performance, Security and Scalability Pressures on Physical AI
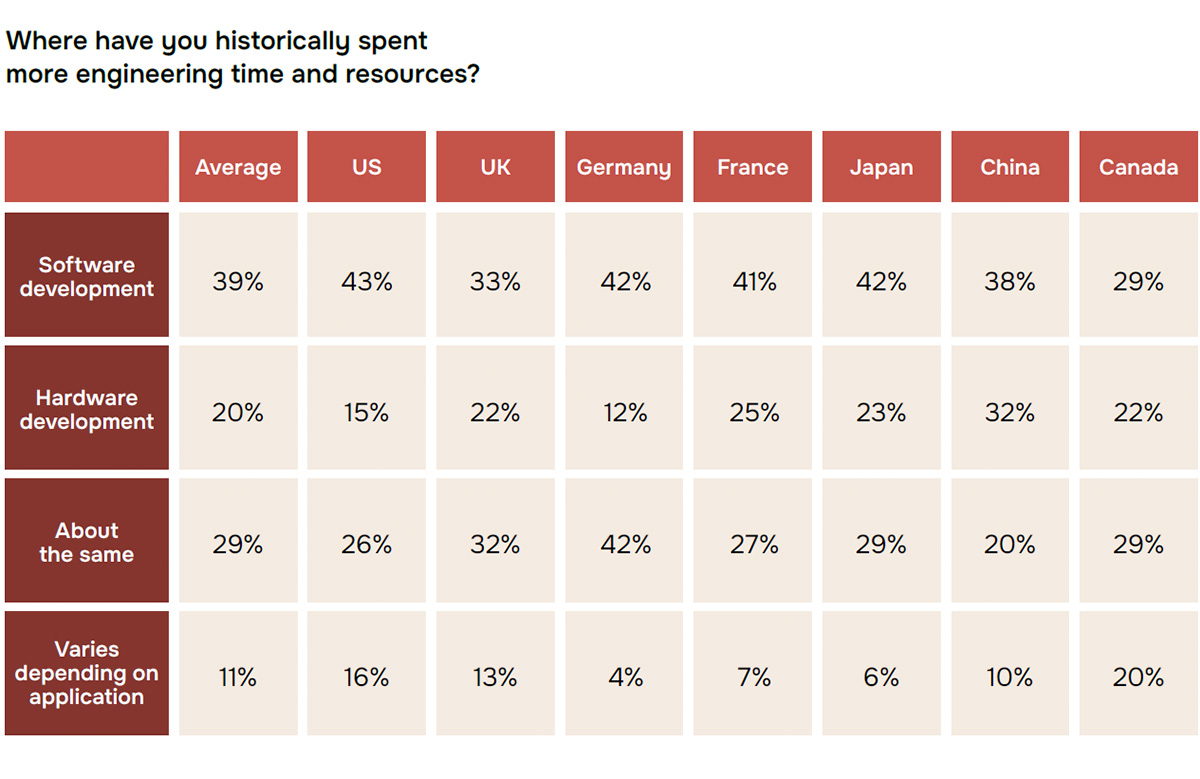
As physical AI systems grow more capable, their software stacks must handle performance, security, and scalability demands that old architectures were not built to support. QNX’s survey shows software development already consumes more developer resources than hardware, and 85% of respondents expect software to play an even greater role over the next three to five years. Teams plan their biggest investments in AI-driven decision making and cybersecurity, both at 51%, followed by operating systems and real-time control software at 37%. This reflects how AI software scalability and security are merging into a single requirement: robots must handle complex perception and reasoning while defending against cyber threats and maintaining consistent timing. When physical AI drives heavy machinery, delivers goods, or works in hospitals, a software flaw is no longer a minor bug; it can be a safety incident, a regulatory issue, or a business risk.
Certification, Compliance and the Cost of Delay
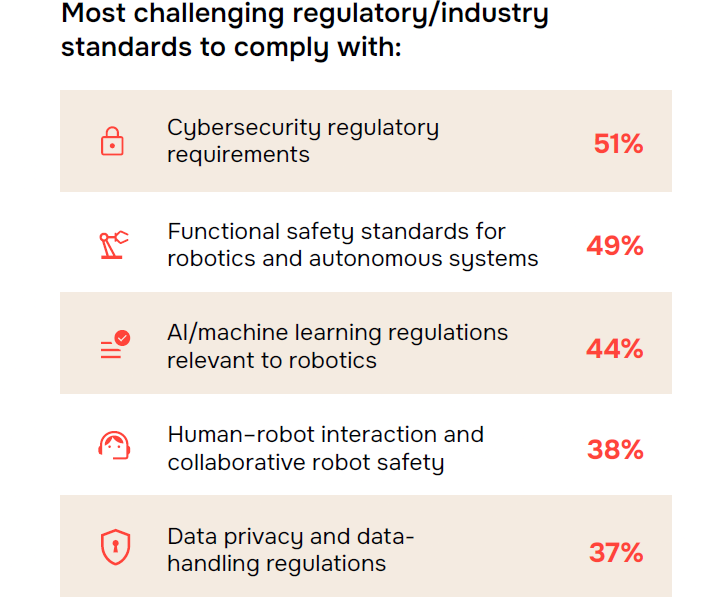
Software-centric robots now face the same compliance burden as other safety-critical systems, and certification has become a major drag on deployment timelines. According to QNX, 66% of surveyed developers report project delays due to certification processes, with cybersecurity standards such as ISO/SAE 21434 and functional safety standards such as ISO 10218 cited as among the most challenging areas by 51% and 49% of respondents respectively. These delays raise development costs, extend time-to-market, and increase commercial risk, even as customers demand quicker rollouts of physical AI solutions. The data also shows a readiness gap: while 89% say AI-enabled robots that can perceive, reason, and act autonomously will be critical to their organisation’s strategy in the next three to five years, only 29% feel very confident in making safe, predictable decisions in real-world environments. Stronger software foundations are their path to closing that gap.

A Maturing Phase: Hardware-Ready, Software-Constrained
Robotics is entering a maturation phase where hardware is ready for wide deployment of physical AI, but progress is throttled by software constraints. QNX executives describe developers running up against “the very real limits of architectures that were never designed for this level of complexity or accountability.” Integration complexity, certification delays, functional safety risks, and the need for predictable behavior in edge cases now define everyday robotics developer challenges. Yet the outlook is not pessimistic. Survey respondents overwhelmingly see physical AI as central to their strategies, and many are open to changing their operating systems and toolchains to gain more reliable, secure foundations. The industry’s next wave will come less from new sensors or motors and more from rethinking operating systems, real-time kernels, and secure, composable architectures so that software stops being the bottleneck and becomes the enabler of scalable, safe physical AI innovation.