
Before You Go Bigger: What Really Changes When Robots Scale
Upsizing an Arduino robot is not just a matter of reprinting parts at 200%. As robots grow, physics starts to push back: weight increases faster than surface area, leverage forces on joints get larger, and small misalignments become big structural problems. Motors that were fine at palm size may stall completely once the chassis is 5–7 times bigger. The famous giant tortoise bot shows this clearly: its maker swapped tiny hobby motors for powerful units from children’s ride-on toys and paired them with a beefier motor driver to keep the same simple drive logic usable at a much larger scale. At the same time, scaling changes your centre of gravity, wheel traction, and even how vibrations travel through the frame. Treat enlargement as a fresh robotics design problem, not a cosmetic upgrade, and plan to rethink mechanics, power, and layout from the ground up.
Designing the Mechanics: Structure, Motors, and Weight Distribution
Mechanical design is where most Arduino robot scaling attempts succeed or fail. Start with structure: thin acrylic or plywood that was stiff enough for a small bot may flex dangerously once scaled, so consider thicker sheets, internal ribs, or laminated layers. The giant tortoise bot uses professionally cut acrylic and custom shells to keep the oversized parts aligned and robust. For motion, replace micro gearmotors with units designed for heavier loads, such as those found in ride-on toys or lawn equipment, and drive them via an appropriately rated motor driver and power supply. Next, tackle weight distribution. A bigger chassis makes it harder to keep the centre of gravity low and central, especially once batteries and electronics are scaled or duplicated. Borrow a trick from PCB drone designers: treat mass placement as a layout problem, sketching component positions and estimating balance before you ever cut or print parts.

Sensors, Calibration, and Control Logic for Larger Platforms
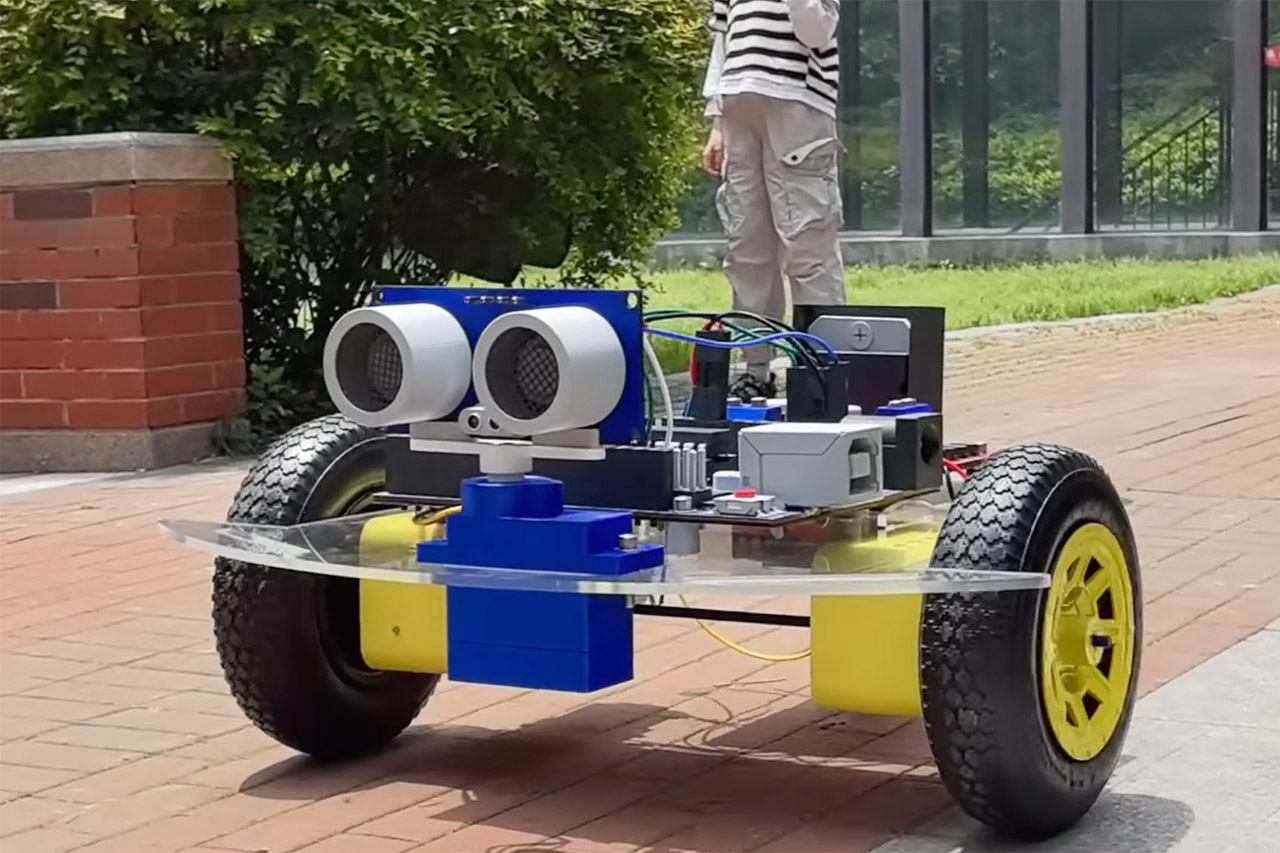
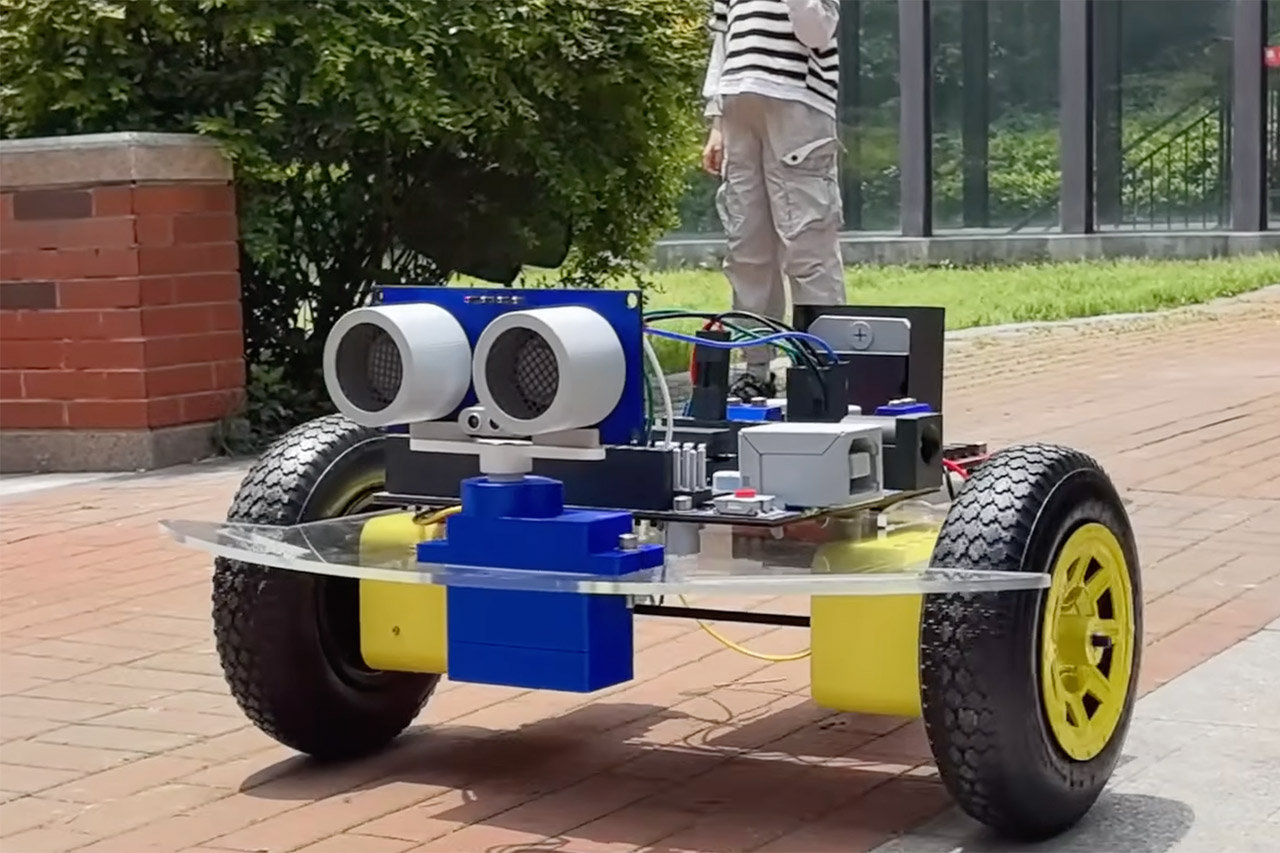
One advantage of Arduino robot scaling is that your core code often survives intact, but your assumptions do not. Larger robots accelerate slower, turn with wider radii, and take longer to stop, so obstacle avoidance thresholds and timing must be adjusted. On the giant tortoise bot, the ultrasonic distance sensor is hidden inside an enlarged shell so it still sees the environment correctly even though the robot is much bulkier. Think in "reaction distance" instead of raw centimetres: how far ahead must the robot detect an obstacle to safely brake or turn at its new mass and speed? Similarly, as robots grow, vibration and noise can corrupt sensor readings. PCB-based drones learned this the hard way, needing soft-mounted IMUs to clean up gyroscope data. When you enlarge a wheeled bot, consider damping for IMUs and secure mounting for ultrasonic and infrared sensors to maintain reliability.
Modular Scaling: Grow Your Bot in Stages, Not in One Giant Leap
Jumping directly from a small desk rover to a 7x monster is tempting, but modular scaling is safer and cheaper. Break the build into swappable modules: drive base, sensor mast, control deck, and power pack. First, upscale the drive base while leaving the original Arduino and sensors untouched; verify that your new motors, driver, and chassis geometry behave well. Next, extend sensor range and reposition modules without changing the core logic, validating updated calibrations and turning behaviour. Finally, enlarge cosmetic components like shells and panels to match the new footprint. This approach mirrors how the PCB drone integrates frame and electronics only after testing vibration and weight distribution on earlier prototypes. Modular design also makes it easier to reuse parts if one scaling step fails. Each successful iteration becomes a proven platform, letting your Arduino robotics projects grow steadily instead of collapsing under the weight of a single bold redesign.

Pushing Beyond Toy Scale: Lessons from the Maker Community
Community experiments show that scaling robotics design can take Arduino platforms far beyond “toy car” size while preserving their simple, approachable logic. The oversized tortoise bot proves that even a whimsical shell can hide serious mechanics, with a giant replica Arduino board on top and a standard Nano doing the actual processing beneath. In the air, the PCB drone demonstrates the opposite extreme: instead of adding structure around the board, the board itself becomes the frame, revealing every connection and component in one glance. Both projects highlight core lessons for DIY robot enlargement: let mechanical design carry the extra load, keep the control logic as clean as possible, and expect to iterate. Whether you are building a floor-crawling creature or a teaching drone, the path to bigger bots is incremental, experimental, and well within reach of the average maker with patience and a soldering iron.