What Cosmos 3 Is and Why It Matters for Physical AI
Nvidia Cosmos 3 is an open world foundation model that combines physical reasoning, world simulation, and action generation so robots, autonomous vehicles, and smart spaces can understand their environments and decide how to act. Designed for physical AI robotics and large robot vision systems, it is built to interpret real-world scenes, predict future outcomes, and generate action sequences tailored to specific embodiments and tasks. Nvidia describes Cosmos 3 as a frontier foundation model that unifies world generation, physical understanding, and controlled scene generation in one system instead of multiple stitched-together models. This matters because physical AI systems must understand the real world before acting within it, and that requires connected capabilities: perception, prediction, and planning. With Cosmos 3, Nvidia is aiming to move physical AI from lab demos toward deployable engineering software for robots, autonomous vehicle AI stacks, and safety or monitoring systems in warehouses and smart spaces.
Mixture-of-Transformers: Two Towers for Reasoning and Action
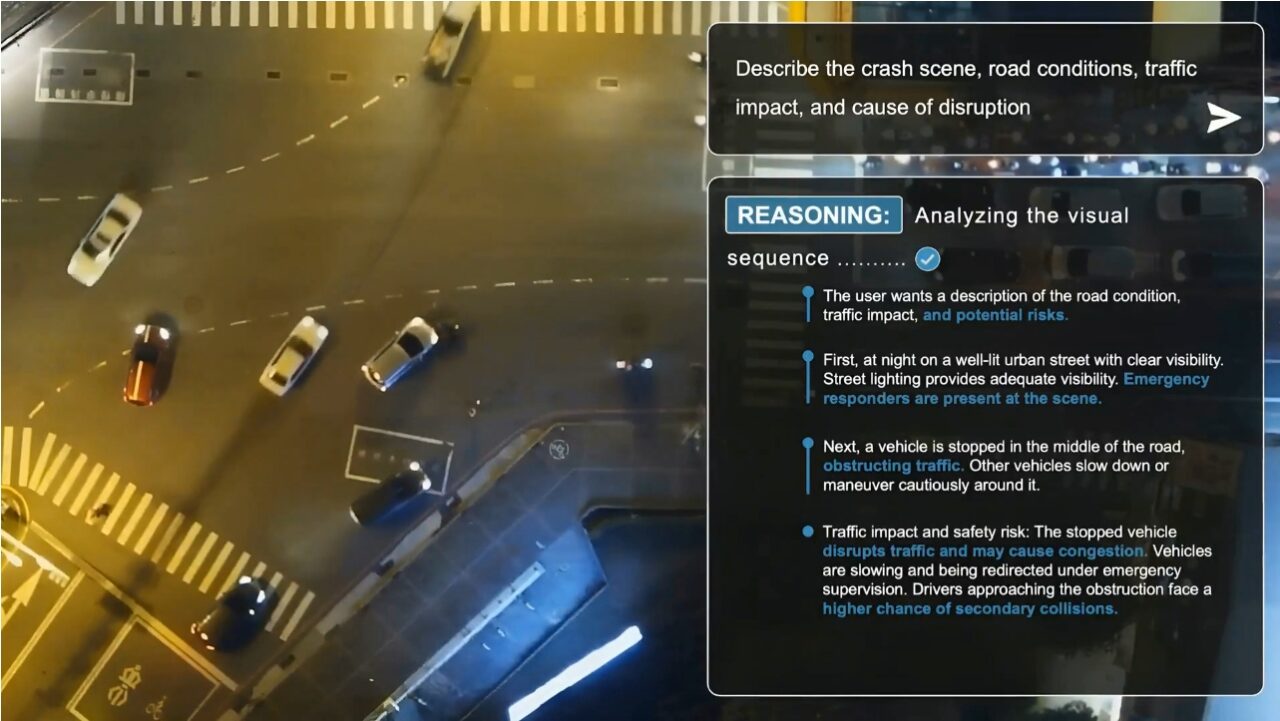
At the core of the Cosmos 3 foundation model is a mixture-of-transformers architecture with two tightly linked towers that share one training and inference pipeline. The reasoner tower is a vision-language model that reads multimodal input—text, images, and video—to infer motion, object interactions, and broader physical context, acting as the system’s “brain” before any generation step. The generator tower then produces physics-aware video and action sequences, using a diffusion process conditioned on the reasoner’s understanding. This design allows the same model to support both reasoning tasks and generative tasks, instead of requiring orchestration across separate world foundation models for perception, simulation, and policy learning. For robotics teams, this means a single model can support world prediction, robot policy learning, and synthetic edge-case data generation, tightening the loop between scene understanding, simulation, and action planning for physical AI robotics and autonomous vehicle AI.
From Scene Understanding to Action: A Stack Built for Robots
Cosmos 3 is built as an omnimodel that can understand and generate text, images, video, ambient sound, and action, which is particularly suited to robot vision systems and autonomous vehicle AI. The model supports multiple input-output paths: for example, text plus image to video for world prediction, video plus text to actions for policy learning, or action plus video to new videos for action-conditioned simulation. Cosmos 3 Nano, with 16B parameters, targets real-time robotics inference on workstation-grade GPUs, while Cosmos 3 Super, at 64B parameters, targets data center use for high-quality world simulation and complex physical reasoning workloads. According to Nvidia, the Cosmos 3 family aims to help developers “build robots, autonomous vehicles and vision AI that perceive, reason, plan and act in the physical world.” This stack is designed to reduce training and evaluation cycles for physical AI systems from months to days.
Open Model, OpenMDW, and Synthetic Data for Physical AI Robotics
Nvidia is positioning Cosmos 3 as an open physical AI foundation model, with model checkpoints, code, and datasets released through public repositories for reproducible work. Models such as Cosmos 3 Nano and Cosmos 3 Super are available on Hugging Face, with supporting code on GitHub and Cosmos NIM microservices for GPU-optimized deployment. For packaging, developers can use OpenMDW-1.1, released through the Linux Foundation, which keeps weights, code, documentation, datasets, and benchmarks under a single model-centric license. That makes it easier to adapt the Cosmos 3 foundation model for physical AI robotics across domains without managing separate legal bundles. Nvidia is also releasing multiple synthetic datasets that cover areas like robotic manipulation, driving, spatial reasoning, and human motion, so teams can post-train or specialize world foundation models for their own robot vision systems, warehouse monitoring solutions, and autonomous vehicle AI stacks.
Toward Practical Deployment: Coalitions and Next-Generation World Models
To accelerate adoption, Nvidia has launched the Cosmos Coalition, a collaboration that includes Agile Robots, Black Forest Labs, Generalist, LTX, Runway, and Skild AI, with a shared focus on next-generation world foundation models. Cosmos 3 is promoted as a leaderboard-topping, fully open omnimodel with native vision reasoning, capable of state-of-the-art synthetic data generation and physical AI policy model development. For robotics and autonomous systems teams, this ecosystem matters as much as the model architecture: they gain open datasets, reference workflows, and deployment paths that shorten the distance from research to fielded systems in factories, warehouses, or transport networks. By tying scene reasoning, world simulation, and action generation together in an open, Mixture-of-Transformers design, Cosmos 3 aims to become a common backbone for physical AI robotics—one that lets machines see, understand, and act with far more context than earlier single-purpose models.