
From Tabletop Toys to Oversized Testbeds
Arduino robotics engineering has traditionally focused on compact, lightweight platforms that trundle around tabletops, avoiding obstacles with simple ultrasonic or infrared sensors. These projects are ideal for beginners, but they rarely push the limits of large robot design. That is starting to change as makers explore scaling Arduino robots far beyond their original dimensions. A standout example is a turtle-style “tortoise bot” that has been enlarged by a factor of seven, transforming a modest demo into a striking, ride-on-scale machine. The project grew out of a desire to test a matching seven-times-larger Arduino Uno replica, showing how a familiar form factor can evolve into an engineering sandbox for robot scaling challenges. This shift illustrates how the maker community is treating classic obstacle-avoiding bots not just as learning tools, but as platforms for serious experimentation in size, power, and control.

Mechanical Scaling: Weight, Structure, and Drive Power
Upsizing a robot by seven times is not as simple as printing bigger plastic parts. The mass increases dramatically, demanding stronger frames, more capable motors, and careful weight distribution. In the giant tortoise bot, the builder replaced tiny hobby motors with robust 24-volt units sourced from children’s ride-on toys to deliver the torque needed to move a much heavier chassis. Laser-cut plywood and large sheets of 1 mm acrylic were used to create scaled-up shells, but the panels were too big for typical workshop cutters, so professional fabrication became essential. Smooth wheels from a lawn equipment supplier were paired with 3D-printed hubcaps to preserve the familiar turtle-bot aesthetic while carrying the extra load. These design choices underscore a key lesson in scaling Arduino robots: every mechanical subsystem—frame, drive train, and wheels—must be reconsidered to keep the machine stable, predictable, and safe at larger sizes.
Power and Control: Big Hardware, Small Brain
Large robot design inevitably complicates power delivery and control electronics. While the giant Arduino board at the heart of the tortoise bot looks oversized, the actual processing is still handled by a standard Arduino Nano hidden inside. This approach preserves compatibility with familiar code while offering an eye-catching, scaled-up interface. For propulsion, a beefy 300 watt motor driver and a three-layer plywood-mounted board act as an enlarged L298N-style controller, feeding those high-torque ride-on motors. A compact voltage regulator steps the supply down to 5 volts for the Nano, ensuring stable logic power despite the heavy-duty drivetrain. Even seemingly simple components like jumper wires had to be reinvented, replaced by metal rods to match the board’s scale. Together, these choices show how scaling Arduino robots can maintain control fidelity by separating visual spectacle from the core, well-understood microcontroller electronics.
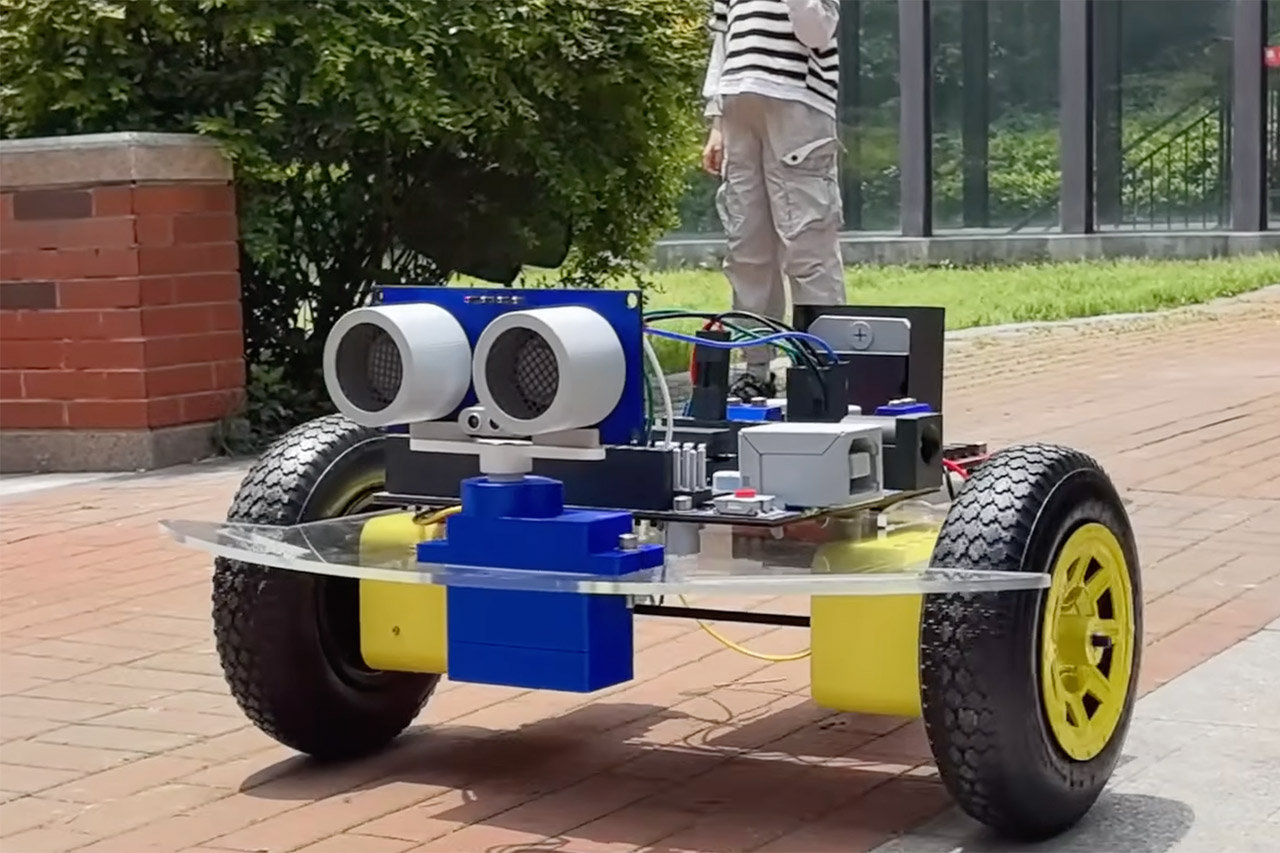
Sensor Strategy: Preserving Responsiveness at Larger Scales
Robot scaling challenges extend beyond mechanics and power; sensors must be adapted without sacrificing responsiveness. In the enlarged tortoise bot, the ultrasonic distance sensor cannot simply be magnified like a piece of decorative plastic. Instead, the maker concealed a standard ultrasonic module inside a dummy outer shell that mimics the look of the original small part. This lets the sensor retain its calibrated detection range and field of view while visually fitting the oversized build. Navigation logic remains classic Arduino robotics engineering: the robot drives straight until an obstacle appears, stops, then sweeps its sensor left, center, and right to identify the most open path before turning and continuing. By decoupling functional sensor hardware from cosmetic scaling, makers can build large, visually coherent robots that react just as quickly—and as accurately—as their small-tabletop counterparts.
From Showpiece to Real-World Platform
Projects like the seven-times-larger tortoise bot demonstrate that scaling Arduino robots is more than a visual stunt. With thoughtful engineering around motor torque, structural materials, and sensor integration, large robots can remain fully operational and responsive. This opens the door to applications that move beyond classroom demonstrations, such as interactive museum exhibits, educational testbeds for advanced control algorithms, or platforms for experimenting with outdoor navigation and heavier payloads. The maker community’s success in preserving control and behavior at larger scales shows that Arduino-based robots are not limited to tiny footprint devices. Instead, they can evolve into practical, real-world machines while still relying on accessible hardware and straightforward code. As more builders adopt similar techniques, large Arduino robots are likely to become a familiar sight in workshops, labs, and public spaces.