
Bio-Inspired Drone Design: Nature as an Engineering Manual
Bio-inspired drone design is an approach to building flying robots that copies how animals move and sense the world, so that autonomous drone navigation becomes more efficient, agile, and reliable using far less computing power than conventional systems. Instead of brute-force maps and heavy hardware, engineers examine how insects and mammals solve the same problems with tiny brains and flexible bodies. Bees, for example, find their way home using motion patterns on their eyes rather than detailed 3D maps. Flying squirrels reshape their whole bodies in mid-air to turn, brake, or stabilise. By reverse-engineering these nature-based flight systems, researchers create drones that can fly in tight spaces, cope with uncertainty, and still run on processors small enough for pocket-sized robots. The result is a shift from rigid machines that overcompute to lighter drones that respond like living creatures.
Bee Navigation Drones: Tiny Brains, Long Journeys
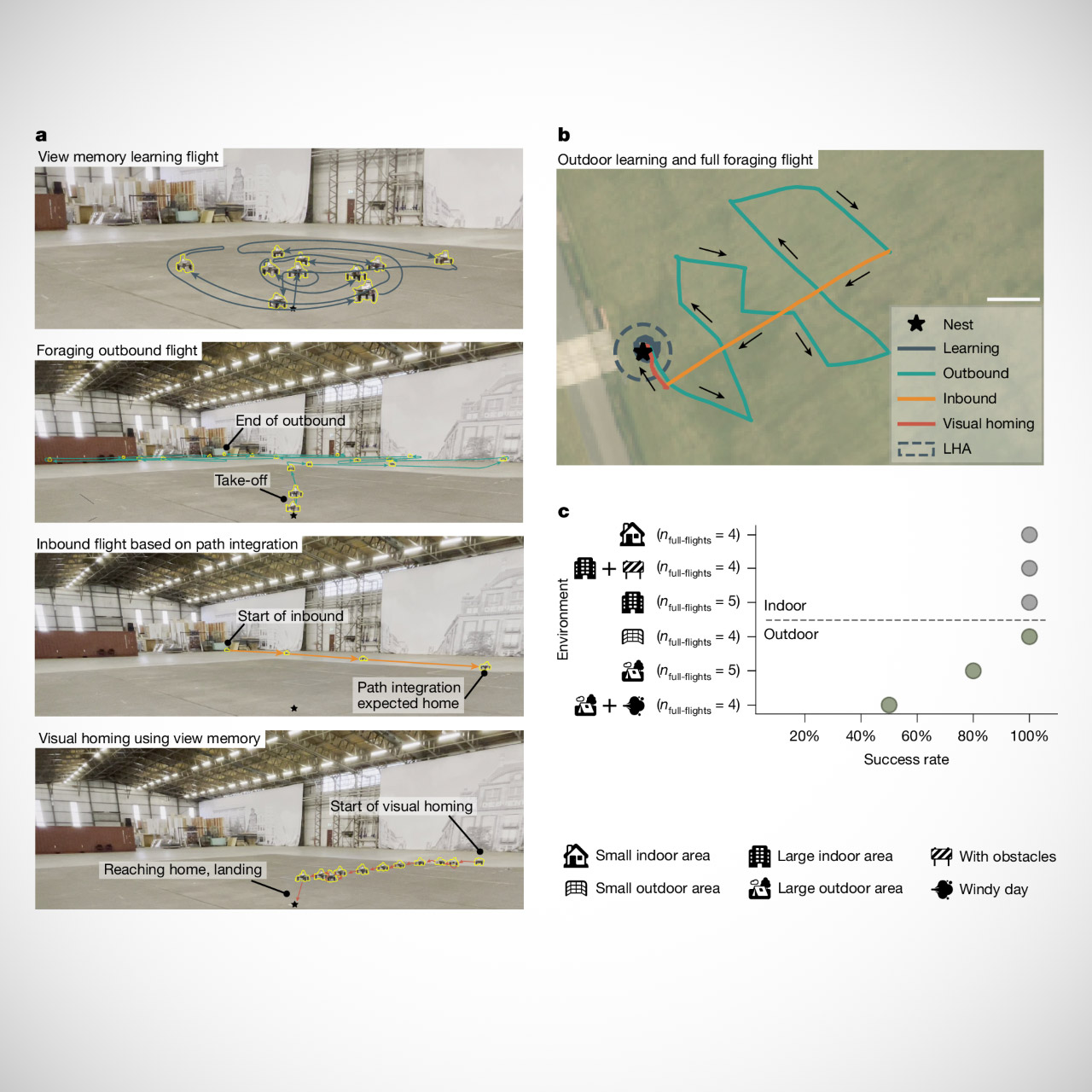
Honeybees inspire a new way to think about autonomous drone navigation. Rather than store full maps, bees watch how the ground and surroundings slide across their eyes, using this optic flow to estimate distance and direction. Shortly after they start feeding, they perform a quick looping learning flight around the hive, building a compact visual memory of home. Delft researchers transferred this idea to small drones using a few panoramic images and motion estimates collected during a short practice flight near the base. The learning system needs only 42 kilobytes of memory, making it light enough to fit where a phone app icon would. Once trained, the drone flies far from its start point using motion estimates, then switches to its visual memory to find home and slow down smoothly, much like bees approaching the hive. These bee navigation drones show how nature-based flight systems can cut computing demands dramatically.
SquirrelDrone: Whole-Body Morphing for Extreme Agility
Flying squirrels glide through forests at night by morphing their entire bodies instead of flapping wings. They stretch limbs, curve their spines, deform soft skin membranes, and move their tails to sculpt airflow. According to Delft University of Technology, the SquirrelDrone reproduces three key mechanisms: coordinated forelimb and hindlimb motion to reshape the aerodynamic body, spine and tail morphing to alter wing posture, and a soft passive membrane that deforms naturally in the wind to boost lift or drag. Wind tunnel and outdoor tests showed clear gains in agility, maneuverability, and stability, with different body motions contributing to each effect. Agility improves when the drone rotates and reorients quickly; maneuverability benefits from sharper turns and steep pull-ups; stability comes from the passive membrane and coordinated limb motions. This kind of bio-inspired drone design replaces rigid wings and separate control surfaces with a single morphing aerial body.

Why Nature-Based Flight Systems Matter for Real-World Tasks
Nature-based flight systems solve several engineering pain points at once: weight, power, and safety. Map-heavy drones need large processors and batteries to store and update detailed 3D environments. In contrast, bee-inspired navigation works on a learning system that uses only 42 kilobytes of memory, cutting processing and energy needs so drones can be smaller and safer around people, crops, or equipment. Squirrel-like morphing wings add agility and stability without complex mechanical control surfaces, which means fewer parts and smoother responses to gusts or obstacles. Lightweight bee navigation drones can weave between rows of plants to look for disease, or move inside warehouses to inspect machinery where GPS is unavailable. Combined with squirrel-style whole-body morphing, future drones could slip through cluttered spaces, brake and turn sharply, and still stay stable in turbulent air, all while running on minimal computing hardware.
From Animal Biomechanics to the Next Generation of Drones
The bee and squirrel projects show how animal biomechanics give direct answers to engineering questions. How do you get reliable navigation without building huge maps? Watch how bees compress the world into a few images and motion cues. How do you turn and stabilise sharply without adding heavy actuators? Study how gliding mammals combine limb, spine, tail, and soft membranes into one shape-shifting wing. These ideas point to a new generation of bio-inspired drone design where control is distributed across flexible bodies and simple, local computations. Instead of fighting physics with ever more code, engineers can copy solutions that evolution has refined over millions of years. As bee navigation drones and SquirrelDrone-type platforms mature, we can expect smaller, more agile machines that explore farms, greenhouses, warehouses, and disaster sites with animal-like awareness and minimal onboard processing.





