From metal to code: defining the new robotics bottleneck
Software has become the main constraint in modern robotics, where physical AI systems rely on complex code to perceive, decide, and act safely in unpredictable real‑world environments. This shift marks a break from the era when hardware performance and cost were the primary limits on robot innovation. BlackBerry QNX’s “Inside the Robot: Architecture Benchmark Report,” based on 1,000 robotics software developers, shows teams now struggle more with software architecture, integration, and assurance than with motors or sensors. As robots leave tightly controlled factory cells and move into hospitals, city streets, and mixed‑use shop floors, the demands on robotics software development grow sharply. Systems must combine AI, real‑time control, connectivity, and security in a single stack, while still behaving in a predictable, certifiable way. The result is a widening gap between what hardware can do and what software can reliably support.

Hardware races ahead while software struggles to keep up
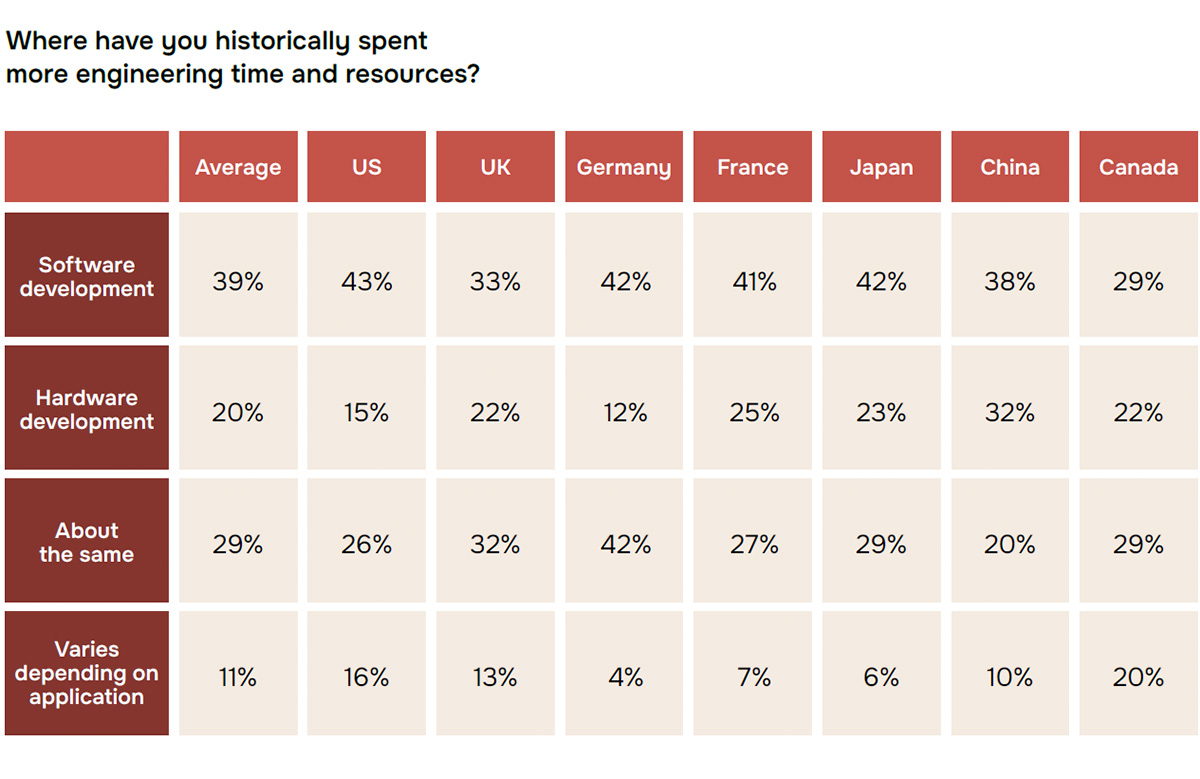
The QNX study highlights a clear inversion of past assumptions: nearly one in three developers, or 27%, name software architecture and integration as their biggest performance bottleneck, compared with only 16% who point to hardware. Processors, sensors, and mechanical platforms are ready for more capable robots, but the software needed to coordinate them lags behind. Developers report that software work now consumes more resources than hardware design, as teams try to stitch together AI models, perception stacks, control loops, and connectivity into cohesive platforms. This mismatch creates a critical AI robotics bottleneck: hardware teams can ship new arms, mobile bases, and grippers, yet product roadmaps stall because the code is not ready for unconstrained environments. According to BlackBerry QNX, 85% of developers expect software to play an even greater role in robotics over the next three to five years.
Unconstrained environments multiply robot innovation challenges
As robots move out of fenced‑off cells into hospitals, warehouses, and streets, physical AI constraints grow far beyond compute or battery life. In the QNX survey, 83% of respondents say their systems are already deployed alongside humans, and two‑thirds of those not yet in human environments expect to be within three to five years. That shift transforms robotics software development: systems must handle partial sensor data, random human behavior, and changing layouts while still acting safely. Developers cite four recurring problems: integration complexity, certification delays, functional safety risks in human‑machine interaction, and ensuring predictable behavior under stress. Nearly all respondents, 95%, say deterministic, real‑time execution is important, yet many still build on general‑purpose operating systems not designed for safety‑critical workloads. This gap between need and tooling makes every new deployment a high‑stakes software risk, even when the mechanical platform is well proven.

Security, certification, and the cost of getting it wrong
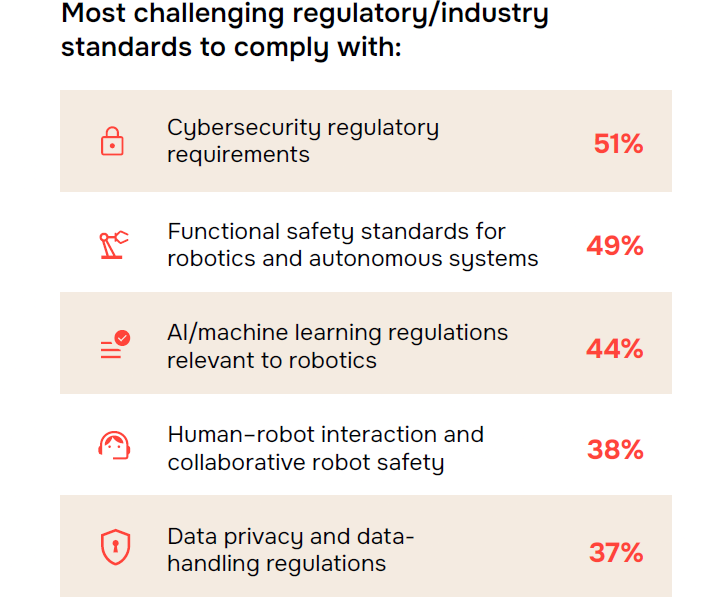
Once robots operate in open, connected environments, security and compliance become central to innovation rather than afterthoughts. Teams in the QNX report rank AI‑driven decision making and cybersecurity as their top planned investments, each cited by 51% of respondents, followed by operating systems and real‑time control software at 37%. At the same time, 66% report project delays due to certification, with cybersecurity standards like ISO/SAE 21434 and functional safety standards such as ISO 10218 among the most challenging to meet. Despite this, 91% still run at least some safety‑critical workloads on general‑purpose operating systems, and 86% of those teams say they are open to changing their OS. The tension is clear: developers want flexible, fast‑moving software stacks, but regulators and customers demand traceable, secure, and deterministic robots that will not behave unpredictably or be exposed to cyberattacks.
What it will take to close the physical AI gap
The QNX findings suggest that solving the AI robotics bottleneck is less about exotic new hardware and more about disciplined software foundations. Teams need operating systems and middleware that can isolate mixed‑criticality workloads, provide deterministic real‑time behavior, and support safety and cybersecurity certification without restarting from scratch for each product. That means moving away from ad‑hoc stacks built on general‑purpose platforms and towards architectures explicitly designed for safety‑critical robots in human spaces. It also means budgeting more time and talent for systems engineering, validation, and standards compliance instead of treating software as a late‑stage layer on top of hardware. If developers can tame integration complexity and security demands, the current hardware‑software mismatch could flip from constraint to advantage, enabling a new generation of reliable, autonomous robots that perform well outside controlled environments.