From metal and motors to code and control
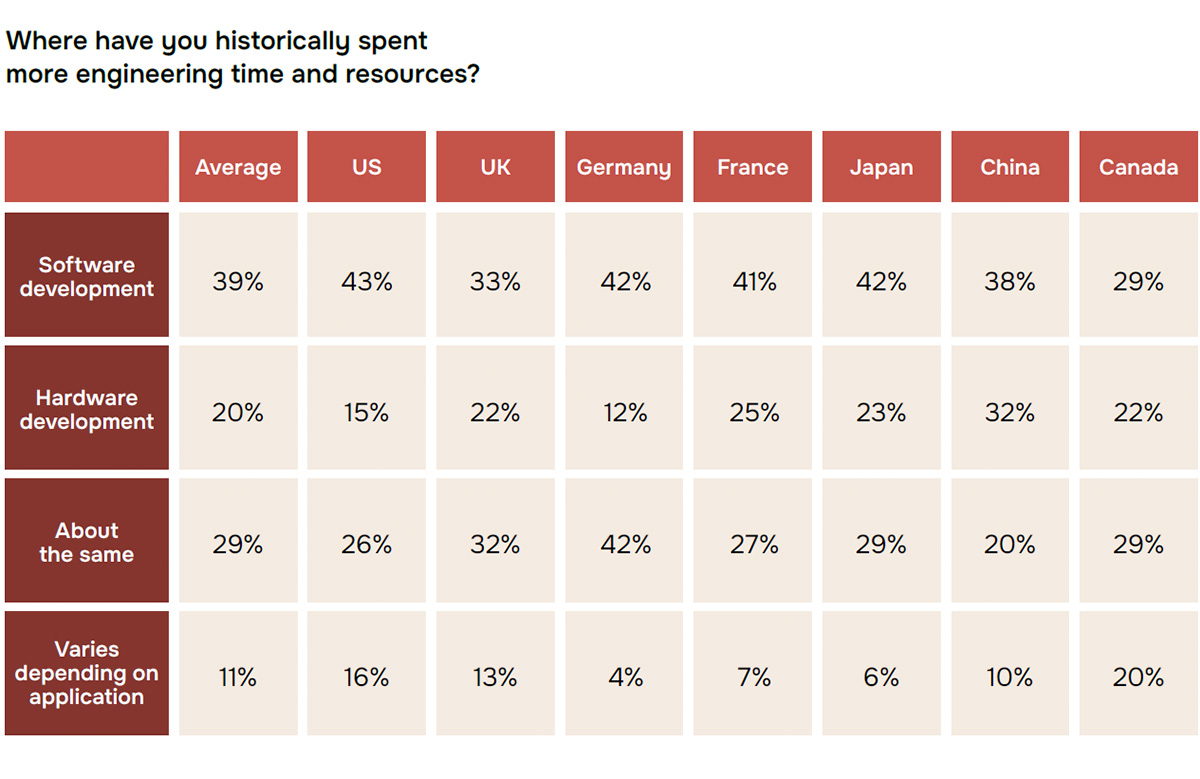
Physical AI robots are machines that combine mechanical systems, sensors, and artificial intelligence software to perceive, decide, and act in the real world without constant human control. As these robots leave tightly controlled factory lines for hospitals, city streets, and shop floors, their performance depends less on motors and actuators and more on the software that coordinates them. QNX’s Inside the Robot: Architecture Benchmark Report shows this shift clearly: almost one in three developers name software architecture and integration as their biggest performance bottleneck, compared with only 16 percent who blame hardware. Robotics teams report growing complexity, tougher safety expectations, and mounting pressure to deliver predictable behavior under all conditions. In this new landscape, the robotics software bottleneck is not a side issue; it is the main constraint on AI robot development and deployment.
Why software architecture now outruns hardware
The QNX research highlights four recurring software hurdles: integration complexity, certification delays, functional safety risks, and the need for predictable, real-time behavior. Robots must blend AI-driven decision making with low-level control, often across mixed levels of criticality—from life-and-death motion control to non-critical analytics on the same platform. That pushes traditional architectures, which were not designed for such dense, interconnected workloads, to their limits. According to QNX, 85 percent of developers expect software to play an even greater role in robotics over the next three to five years, with 51 percent planning major investments in AI decision logic and 51 percent in cybersecurity. Hardware innovation continues, but the lag in scalable, modular software architectures means new sensors and actuators cannot reach their full potential, turning code—not chips—into the primary robotics software bottleneck.

Real-time operating systems and life among humans
As robots share space with people, timing and reliability become as important as intelligence. More than four in five surveyed teams say their systems already operate alongside humans, and nearly all respondents indicate that deterministic, real-time execution matters to their applications. Yet 91 percent still run at least some critical workloads on general-purpose operating systems rather than platforms built for real-time operating systems and safety certification. This mismatch creates tension: developers want flexibility and familiar tools, but regulators, customers, and safety teams require guaranteed response times and traceable behavior. The result is a growing gap between ambition and readiness for physical AI robots in unconstrained environments, where a missed deadline or unexpected latency can translate into safety incidents, compliance failures, or stalled deployments.

Autonomous systems security and the weight of compliance
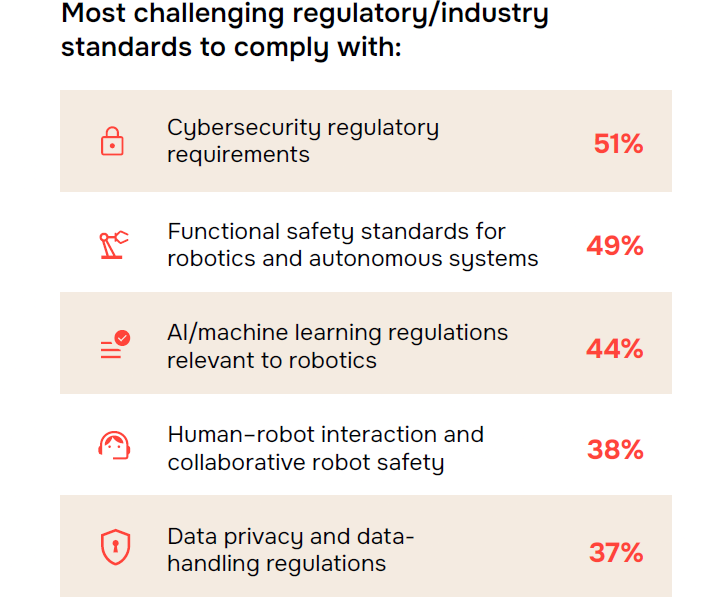
Security and compliance add another layer to the robotics software bottleneck. As robots connect to wider networks and cloud services, autonomous systems security becomes essential, not optional. Developers in the QNX study rank cybersecurity and functional safety among the hardest standards to satisfy, with cybersecurity requirements cited by 51 percent of respondents. Two-thirds report project delays due to certification, a burden that raises costs and increases commercial risk. Many teams still rely on software stacks never designed for safety-critical or real-time contexts, which complicates audits and prolongs approvals. At the same time, robots’ growing presence in surgical suites and busy shop floors raises expectations for defensive design: secure boot, partitioned workloads, and attack-resistant communication need to be built into the base architecture, not added as afterthoughts.
Rethinking development for a software-led robotics era
The research signals a clear pivot point: AI robot development must move from hardware-first thinking toward software-centered design. That means treating operating systems, middleware, and safety-certified components as strategic assets rather than utilities. Teams need architectures that separate mixed-criticality workloads, support real-time operating systems where required, and integrate AI services without compromising predictability. It also means investing in secure-by-design practices so autonomous systems security is part of the core stack, not a bolt-on feature. Companies that adapt can cut integration complexity, shorten certification cycles, and unlock more reliable autonomy in the field. Those that do not may find their most advanced mechanical platforms held back by fragile code and delayed approvals, proving that in physical AI robotics, the real frontier is now software, not steel.