
Bee Brain Logic for Low-Power Drone Navigation
Bee navigation drones are small autonomous aerial vehicles that copy honeybee strategies for finding their way home, using compact bio-inspired flight algorithms instead of heavy, map-based computing so they can fly and return accurately with very low onboard processing power. Researchers at Delft University of Technology studied how honeybees fly long, twisting routes yet return to the hive with striking precision. Bees watch how the ground and surroundings flow past their eyes to estimate direction and distance. They then correct errors by making a short looping “learning flight” near the hive, storing panoramic visual memories of the area. Delft engineers translated this into code that fits in memory small enough for a basic phone app icon, enabling low-power drone navigation that no longer depends on detailed 3D maps or global satellite signals.
How the Bee-Inspired Flight Algorithm Works
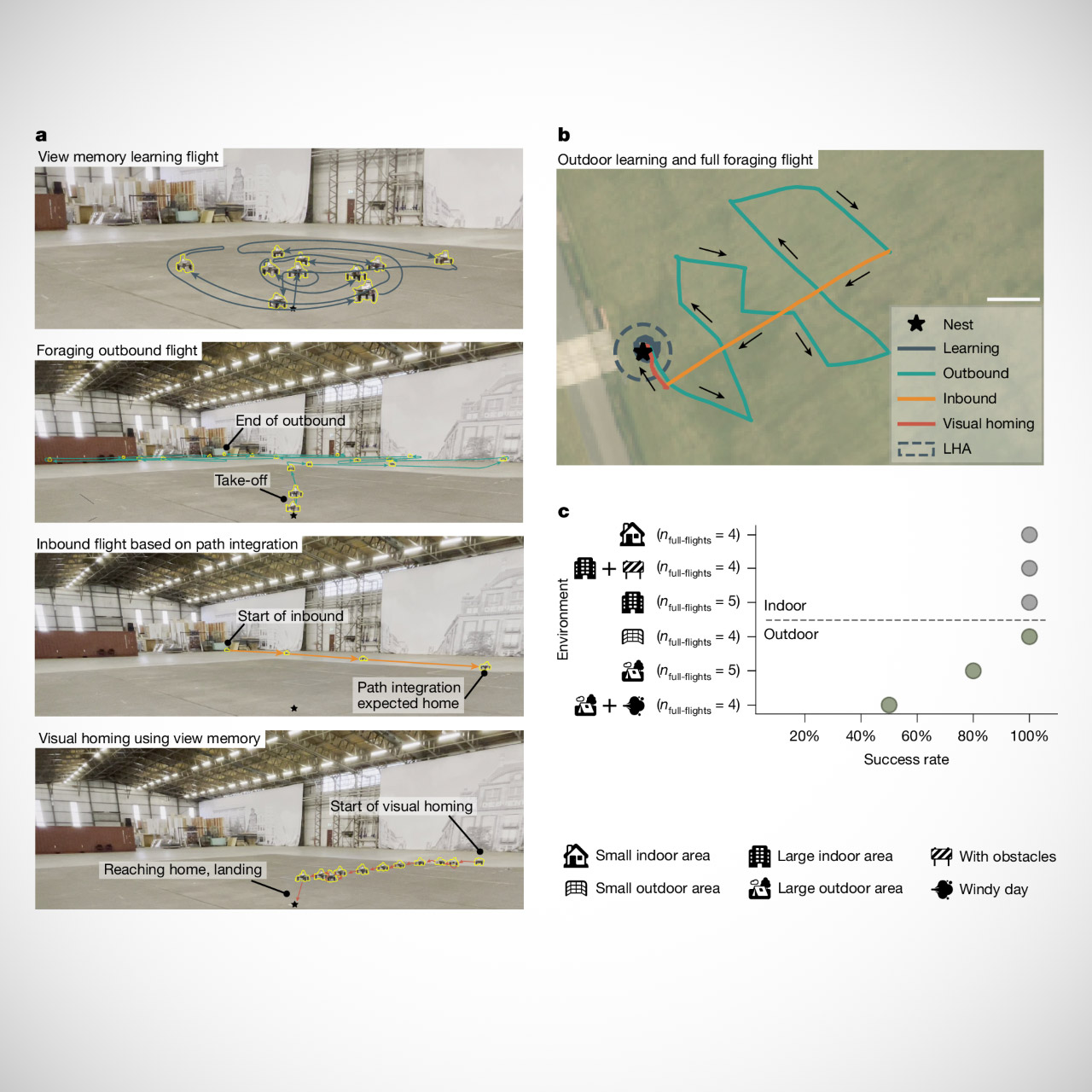
Instead of building a full 3D model of the world, the drone performs a short practice flight around its starting point and captures a handful of panoramic images. These snapshots are paired with rough estimates of how far and in which direction the drone has moved. Although these motion estimates are imperfect, the learning system extracts enough structure from the surroundings to define a visual “home zone.” On later missions, the drone relies on simple motion estimates to travel out and back. Only when it nears the learned region does the visual system take over, comparing the live camera feed with stored panoramas to guide the drone back to its exact starting spot. The same bio-inspired logic also teaches the drone to fly faster in open areas and slow down as it approaches home, mirroring honeybee behavior.
Minimal Computing Power, Maximum Autonomy
The standout feature of this bee navigation approach is its tiny computing footprint. The outdoor version runs on a learning system that uses only 42 kilobytes of memory, far less than traditional GPS-denied navigation methods that build dense maps and demand powerful processors. According to Delft University of Technology’s Micro Aerial Vehicles Lab, this reduction in memory and processing needs allows designers to avoid bulky hardware and high energy consumption. With fewer sensors and lighter electronics, drones become safer around people and in confined spaces because they carry less mass and require smaller batteries. This kind of low-power drone navigation is especially attractive for micro airframes that were previously too constrained to support advanced autonomy, opening the door to cheap, disposable, or swarm-style autonomous aerial vehicles.
From Hangars to Fields: GPS-Denied Navigation in Practice
Tests in large indoor hangars and arenas showed that a drone could take off, fly to the far side of the space, and return to its launch point without ever seeing it during the trip. Outdoors, the same bio-inspired flight algorithms guided a drone more than 600 meters away before it turned and came back, still operating on stripped-down hardware. Performance stayed reliable on calm days; strong gusts caused more drift and made the camera’s view less stable, exposing a key challenge for GPS-denied navigation in the real world. Even so, the system proved that practical autonomous flight does not require heavy mapping stacks. By combining motion estimates with compact visual memories, these autonomous aerial vehicles can handle long-range operations while keeping their onboard computing to a minimum.
Nature-Based Design for Future Aerial Systems
The bee-inspired work at Delft sits alongside other bio-inspired flight research from the same university, such as the SquirrelDrone, which mimics flying squirrels by morphing its entire body to improve agility, maneuverability, and stability. Together, these projects show a shift toward nature-based solutions for real-world drone constraints: limited power, tight spaces, and complex aerodynamics. Instead of scaling up conventional aircraft designs, researchers copy animals that already thrive in cluttered, GPS-denied environments. Bee navigation drones point toward small autonomous aerial vehicles that can inspect warehouses, move between crop rows in greenhouses, or explore indoor industrial sites safely and efficiently. As more flight algorithms and airframes borrow from insects and gliding mammals, bio-inspired flight algorithms are likely to define the next generation of compact, adaptable aerial robots.





