What 3D Printed Electronics Mean for Space Robotics
3D printed electronics are electronic circuits and components produced layer by layer with additive manufacturing processes, allowing conductive, structural, and sensing materials to be printed together into integrated, custom-shaped devices that remove many traditional assembly steps. For space robotics applications, this shift is more than a production tweak; it is a design reset. Printed conductors can follow complex curves, sensors can be embedded in structural shells, and power or data lines can be routed inside lightweight scaffolds. Instead of bolting electronics onto a finished robot, engineers can treat the entire surface as a functional electronic system. This approach lowers part counts and connectors, which are frequent failure points in space. It also supports new robot skin technology that turns external panels into sensing and thermal-control layers, preparing robots for harsher missions and more autonomous operation.
DTI’s Smart Robot Skin for Harsh Space Environments
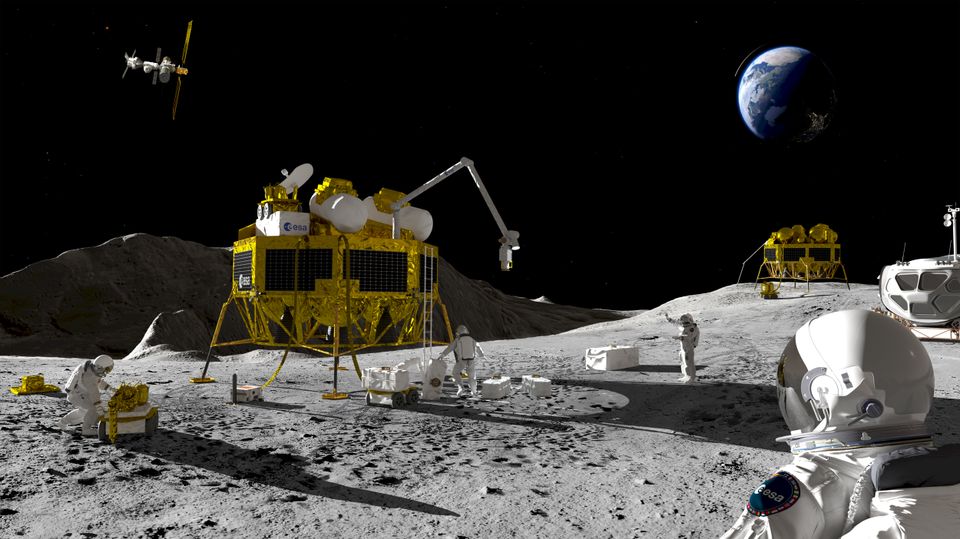
In a European Space Agency project, the Danish Technological Institute and partners are building 3D printed electronic “smart skin” for robots intended for space missions. The skin addresses thermal management, dust protection, and safer human-robot interaction by combining structural shells with embedded wearable electronics. Additive electronics manufacturing lets the team route data and power lines through a tailored outer scaffold instead of relying on separate harnesses and panels. This integrated shell can host sensors that improve motion control and durability while keeping weight low, an advantage for any space robotics applications. AM design specialist Andreas Weje Larsen describes their method as using computational design and compliant mechanism synthesis to apply topology optimization “in reverse” to design flexibility instead of stiffness, a notable shift in how space-grade structures are conceived. The same robot skin technology is also being studied for work in wet fields, recycling sites, and other extreme terrestrial environments.
Additive Electronics as a Factory in a Tool
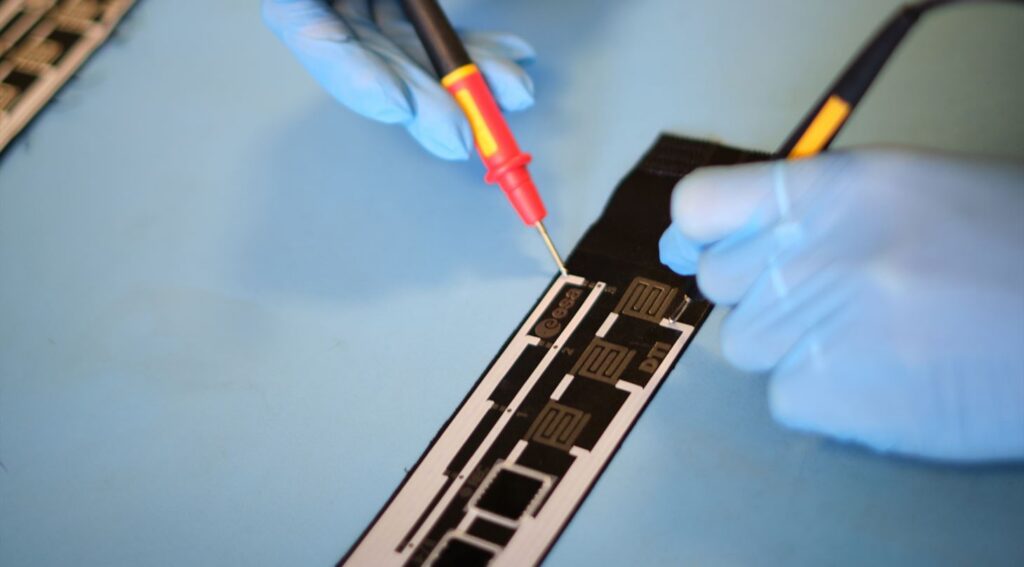
Where DTI focuses on functional robot skin, nScrypt targets the full electronics production workflow with its “Factory in a Tool” platforms. These systems combine additive deposition, subtractive correction, pick-and-place, inspection, and electronics integration in one machine, turning a traditional production line into a single integrated tool. That capability is critical for 3D printed electronics, where even small defects can stop a circuit from working. According to nScrypt CEO Ken Church, the goal is 100% yield, and the company builds inspection into each layer so defects can be detected and corrected in real time. The same hybrid system generates rich process data, which supports machine learning for more reliable additive electronics manufacturing over time. By printing, inspecting, and repairing within one coordinated workflow, nScrypt reduces the risk and complexity that have constrained printed electronics in high-stakes aerospace and defense projects.
From On-Orbit Repair to Autonomous Space Systems
The convergence of structural printing and integrated electronics is opening new paths for autonomous space systems. DTI’s smart skin concept shows how robot bodies can become active sensing and thermal-control surfaces, rather than passive shells. nScrypt’s platforms, including the field-deployable nRugged system, extend that idea into maintenance: in remote or defense settings, technicians can repair damaged circuits on-site instead of waiting weeks or months for replacements. In well under an hour, a circuit that might have grounded a system can be restored, improving readiness and resilience. Together, these advances cut connectors, cabling, and manual assembly, which are common failure modes in space robotics applications. As more functions are printed directly into robot structures, missions can move toward lighter, more adaptive robots capable of self-monitoring and, eventually, more autonomous decision-making in deep space and other hard-to-reach environments.