From metal and motors to code: redefining the robotics bottleneck
The robotics software bottleneck is the growing problem that software architecture, integration, and security now limit robot performance more than hardware, slowing physical AI innovation as machines move into daily life. QNX’s new “Inside the Robot: Architecture Benchmark Report” makes this shift unmistakable. In its survey of 1,000 robotics developers, almost one in three participants (27%) named software architecture and integration as their biggest performance bottleneck, compared with 16% who pointed to hardware. That gap shows robot performance constraints are no longer mainly about sensors, motors, or compute boards. Instead, developers are wrestling with how to build predictable, safe, and scalable systems on top of increasingly complex software stacks. As robots leave controlled labs and pilot projects and enter hospitals, streets, and busy shop floors, weak software foundations are becoming the main reason promising prototypes fail to become dependable products at scale.
Physical AI meets unconstrained environments
Physical AI innovation means robots that can perceive, reason, and act autonomously in real‑world settings instead of fenced‑off workcells. In the QNX research, 89% of respondents said such AI‑enabled robots will be critical to their organisation’s strategy in the next three to five years, yet only 29% feel very confident about safe, predictable decision‑making outside controlled environments. At the same time, deployments are already shifting. More than four in five developers (83%) report their systems operate alongside people, and many of the rest expect this within a few years. This puts new weight on deterministic, real‑time execution, which 95% of respondents rate as important. Yet most teams still depend on general‑purpose operating systems for at least part of these workloads, creating tension between flexibility and the guarantees needed when machines share space with humans in hospitals, factories, and public spaces.

Security, safety, and certification: software under pressure
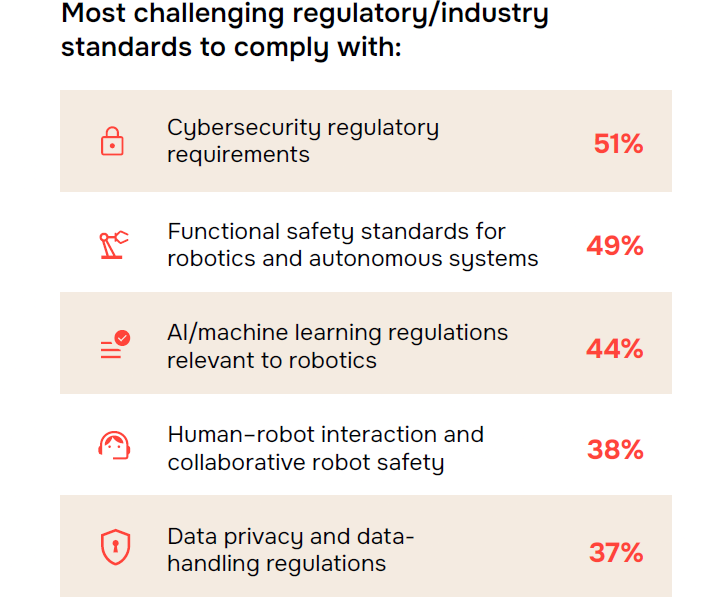
As robots move into human environments, security and safety obligations turn software into a high‑stakes liability. According to QNX, two‑thirds of developers (66%) report project delays from certification processes, with cybersecurity and functional safety standards among the toughest hurdles. Cybersecurity rules such as ISO/SAE 21434, along with robot safety standards like ISO 10218, force teams to prove not only that their systems work, but that they fail safely and resist attacks. Yet 91% of respondents still run safety‑critical workloads partly on general‑purpose operating systems, even though safety‑certified commercial platforms are rated the best fit. That gap between what teams use and what they say they need shows how current software choices complicate both compliance and real‑world reliability. Certification delays then ripple through budgets, delivery schedules, and commercial risk, making sound software architecture a strategic decision rather than an implementation detail.
Software scalability challenges reshape development priorities
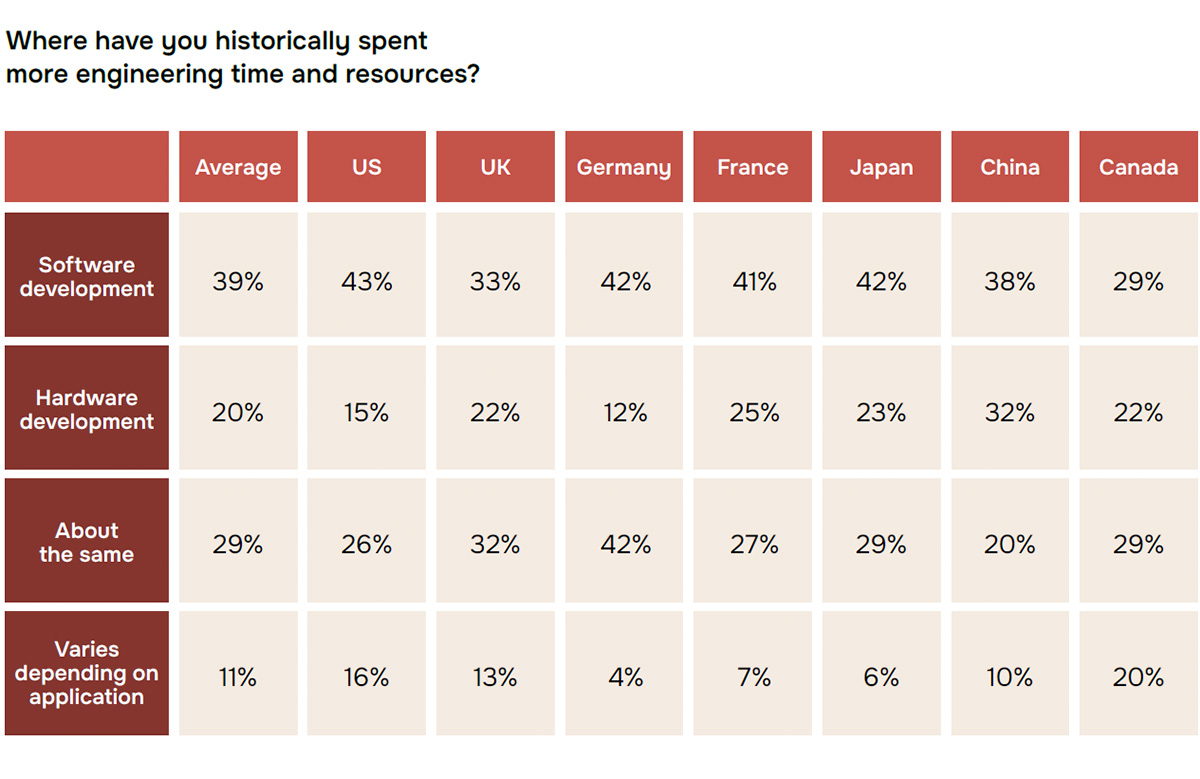
Beyond safety and security, teams are struggling with software scalability challenges: integrating more sensors and AI models, supporting fleets, and updating systems in the field without breaking real‑time guarantees. The QNX survey shows software development now consumes more developer resources than hardware, and 85% of respondents expect software to play an even greater role within three to five years. Investment plans reflect that shift, with teams prioritising AI‑driven decision making and cybersecurity at 51% each, followed by operating systems and real‑time control software at 37%. Jim Hirsch of QNX summarised the situation by noting that developers face “integration complexity, certification delays, functional safety risks in human‑machine interaction, and ensuring predictable behavior when it matters most.” These are classic software architecture problems. Solving them will decide which companies can scale from clever demo robots to reliable, widely deployed physical AI systems.