What This DIY Humanoid Robot Project Offers
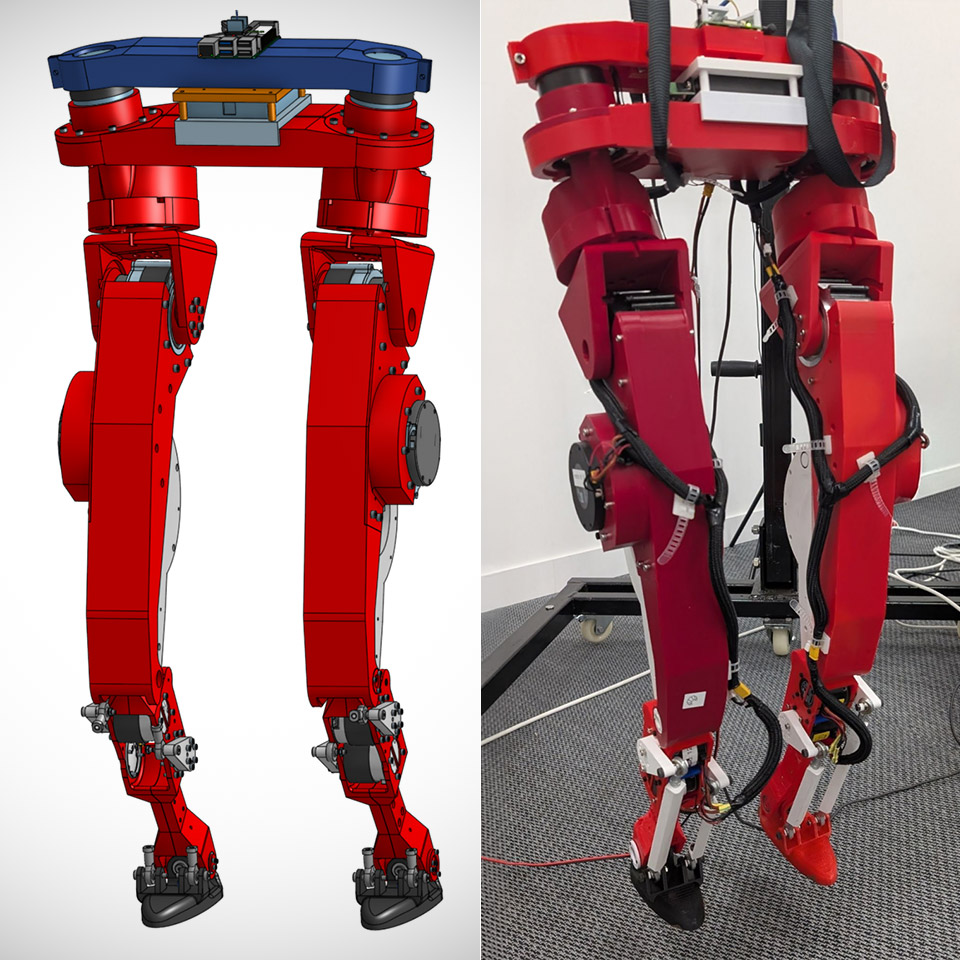
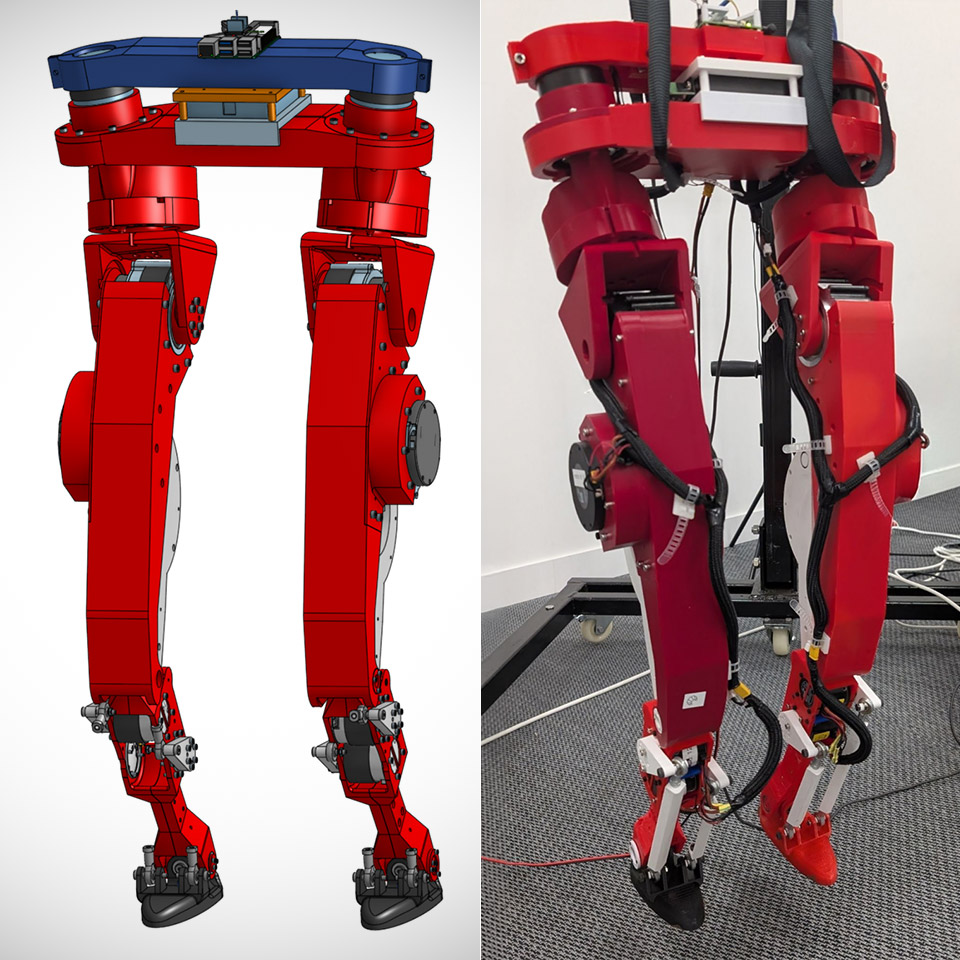
A DIY humanoid robot in this context is a bipedal, 3D printed robot platform that uses off‑the‑shelf electronics and open source software, allowing hobbyists and researchers to assemble, program, maintain, and upgrade an affordable robot build at home or in a small lab. Hugging Face has released a complete set of open source robotics plans for a bipedal platform that costs roughly USD 2,500 (approx. RM11,500) in parts and relies mostly on 3D‑printed components plus common actuators and electronics. The project gives you 75 printable files forming the torso and both legs, plus a public Onshape CAD model so you can inspect or adapt the geometry before printing. Because the files are modular, you can swap hip mechanisms, knees, or feet without redesigning the entire 3D printed robot, which makes this DIY humanoid robot an approachable base for experiments rather than a fixed, proprietary product.
Planning, Printing, and Preparing the Hardware
Before you start printing, examine the Onshape CAD model to understand the modular sections: hip mechanisms, thighs, knees, shins, ankles, and feet. This helps you plan print orientation, support usage, and any small tweaks for your printer. According to TechEBlog’s report on the project, the design provides “75 printable files that form the torso along with left and right legs” and uses between 3.5 and 4 kg of filament in total, which keeps replacement parts inexpensive. Use PLA+ filament for a good balance of strength and ease of printing, especially for load‑bearing parts in the legs. Organise your prints by section and label them as they come off the printer; this avoids confusion once you begin assembling the 3D printed robot. While parts are printing, gather screws, wiring, and tools so the mechanical build can move forward smoothly.
Electronics Setup: Motors, Sensors, and Control
The heart of this DIY humanoid robot is a set of 12 RobStride actuators driven by a Raspberry Pi 5 and connected over a CAN bus. Two O0 units sit near the torso, two O2 units handle hip rotation, four O3 units power the thighs, and four O5 units drive the shins. An IMU sensor monitors the robot’s position, giving crucial feedback for balance. A twin‑channel CAN FD adaptor sits between the Raspberry Pi and the actuators, providing reliable communication. Hugging Face’s instructions recommend connecting each motor to the main computer and running the provided scripts before any mechanical assembly. This step confirms power delivery and addresses faults while the robot is still in pieces, reducing the risk that it will lurch into motion unexpectedly. Label each cable, keep your wiring tidy, and verify every motor ID on the bus before moving on.
Mechanical Assembly and First Standing Tests
Once electronics are tested, start assembling the 3D printed robot from the hips downward. Build each leg as a module, installing the RobStride actuators into the thigh and shin segments, then attach knees, ankles, and feet. The modular layout makes it easier to troubleshoot individual joints or swap in new designs later. Secure all fasteners but avoid over‑tightening screws in plastic parts. Route cables cleanly through the torso and legs to prevent snagging during movement. With everything assembled, follow the runtime package’s calibration procedures to align joint angles and sensor readings. Use the provided safe command interface to send gentle motions while the robot is supported, such as small knee bends or ankle movements. When the calibration looks correct, progress to assisted standing trials: support the robot with your hands or a frame while testing early balance policies, rather than attempting free standing immediately.
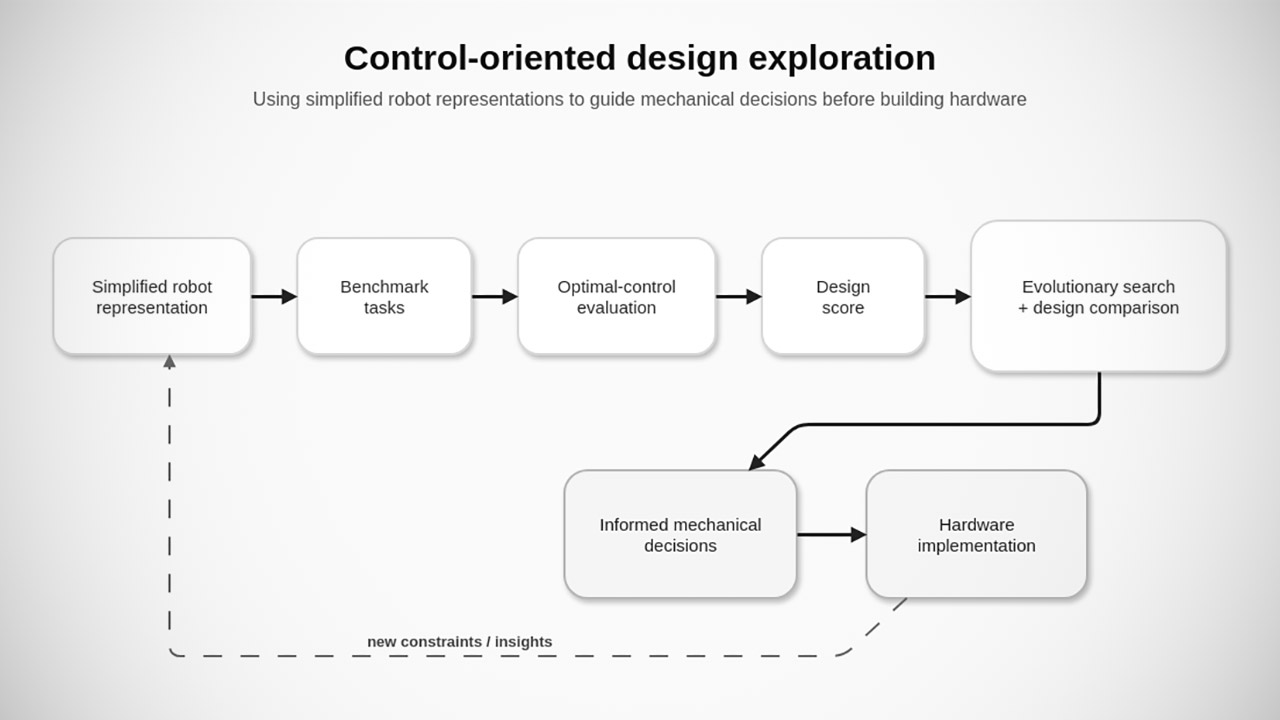
Teaching Motion and Expanding Your Open Source Robot
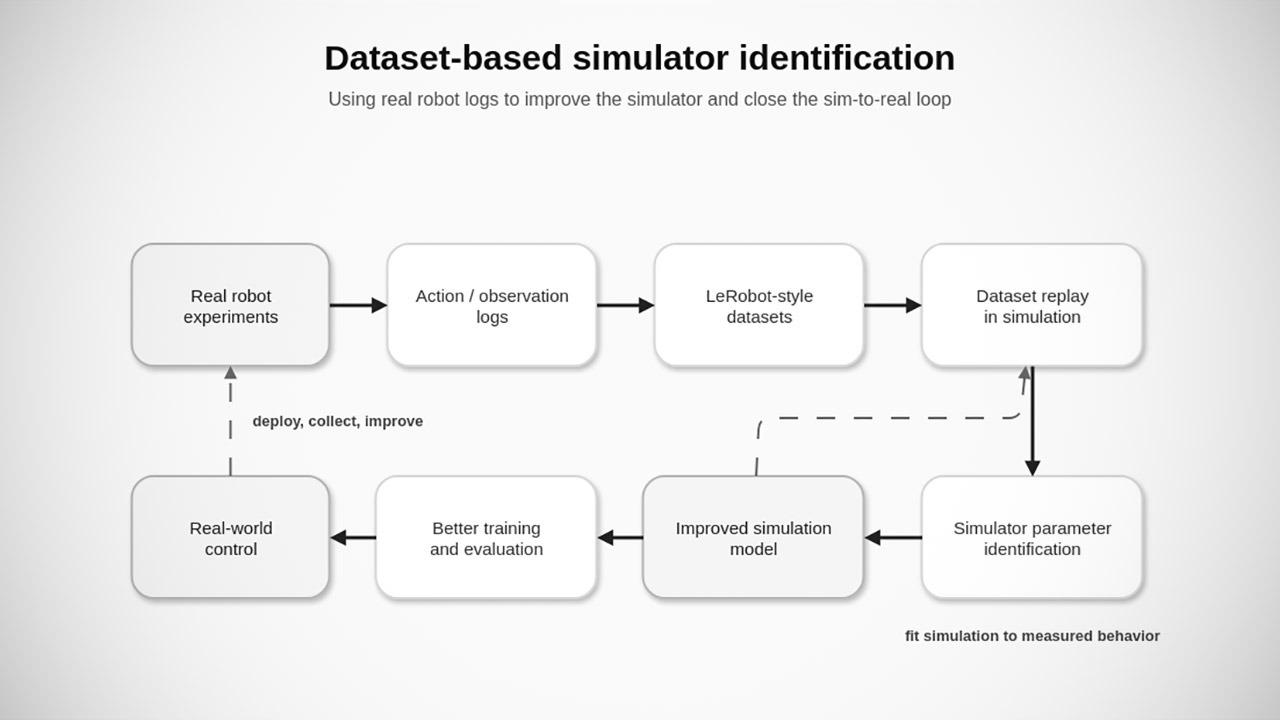
Hugging Face’s software stack makes this affordable robot build far more than a static project. The package includes simulators where you can test reduced versions of the robot against benchmark tasks, plus identification tools that match simulation behaviour to the real machine using logged data. The “legged zoo” resource gives you tools to design and evaluate locomotion policies, including examples trained in simulation and applied to the real robot to keep it stable. Because the platform plugs into the broader LeRobot library, you can reuse demo data, models, and code you already have for other open source robotics projects. When a part breaks or you want to try a redesign, print a new module in PLA+ and swap it in. Over time, you can extend the system with an upper body, arms, and more complex behaviours as your skills grow.